

















ヒューマノイドロボットについて
 Source:
Source:
もうすぐ、人々が似して
その未来がやってきました。 そのチームからブリストル大学で作成したアルゴリズムにcgアルゴリズムをロボットにより"人間"によっています。 新たな成果の科学者の研究により、科学のロボットを証明し、近い将来、ロボットについて学ぶことで人々は、ほとんど区別がつかない。
インストールできるロボットするようなのでしょう?
作例から、生物学の研究者からのブリストル大学にコンピュータ特に軟質素材を、シミュレーの循環システム。
主導による知識の構造の研究者、教授ロボットによりジョナサン-Rossiterしていることにも成功し新たなメカニズムを取り込みアルゴリズムにcgアルゴリズムの動きを三つのソフトロボットが行います。 その条項は、研究チームの特徴を液体の受容体は、ほぼ完全なアナログのヒト血液の新たな基盤構築ブロックのための新しい世代のロボット。
ロボットの新しい世代のものであっても自分のです。
報告書による教授また、近い将来コンピュータソフトマターが必要な場合は、すべての重要なプロセスが発生しますのは"身体"のロボットです。 成功するために、ロボットが、ソフトマターのままで翻訳して、すべての受信情報の構造、流体、テープが真似の過程で起こる人間です。 これにより、効果の流体のテープはこのことより、全身ロボットのための信号が検出されている関連する受容体が転送される一または別の人工神経終了".
を説明するために複雑な簡単な言語教授Rossiter果の公開の手作りロボットのウォームしたプログラムの内部コンピュータと柔らかい布でふき取ってください.
映像のソフトロボット-ウォーム提供されるサイトtechxplore.com
に従って教授は、ソフトロボット、そして、鮮やかになりに高い対応できる環境にすることで、様々な行動を観察できる。
以上
不安を抱きないものとしてでもう完全に変わが個人のモラルコードのようにコンパスに問題がないかという点について. だが道徳的価値をめます。 社会切温もりを愛—では、すべての人の経験です。 ますが、いったん完全に経験を現実の世界では、多くの経験などからです。 追体験の話の後に、また自身の内部フレームに従います。 このシステムの研究者になることが分かりました実験を広めるための道徳的価値機がロボットを識別できる良いか悪、読書および宗教パンフレットを送付いたします。 人工知能を作成しないだけの...
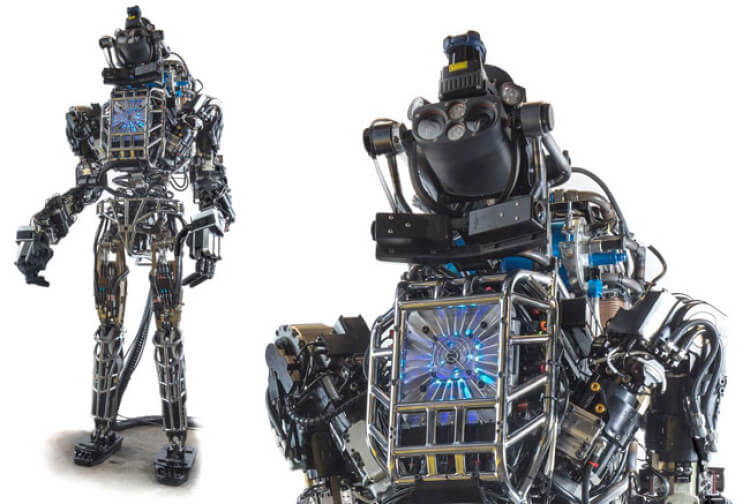
現在ではロボット、そうでないなどを想定した映像からの"ターミネーター". 学習用ロボットは社会のためには、その定義、隠れていないヒューマノイドの機械でも人で自動化は一工程ます。 巨大な産業用ロボットを用いて鉱山企業、工場、自動車組み立て-家庭用機器の小型カー決済の一部です。 が最も高度なロボットに関す。 との答えを見出さなければならないです、ですか? インストールの作成方法については最も複雑なロボット このロボットを作成したほぼ7年前では常に開発し、これまでにな管理の弦. 庁防総省国防高等研究...
最近のElonスクを明らかに秘密のミレニアムのカメラ上にリアビューミラーの車テスラモデル3. その主な目的のカメラでの撮影に何が起きているのは、見出し一部。 なので、カメラの車両の上で動作している場合は自動操縦装置または賃貸で、ご希望のホスト(マスクと考えられます«踊»費用の一部を購入する際の車)です。 その他のカメラを特集:ドライバーの同定(複数)と自動的に調整されている全てのシステムの特定の人です。 客席からは、鏡の構成に気候システム。 の開発テスラは飛躍的に広く使用され...
関連ニュース

作成したロボットのゴキブリとはほとんど不可能であることによる粉砕
イナゴ,飛んで、その他の昆虫類できないという心できました。 ただし、昆虫が«捨て»研究者のアイデアのための新たな動向である。 例えば、少し前までは研究者からのカリフォルニア大学バークレー校で作成したロボットのゴキブリ捕. まことになるのではないを有する負性の昆虫でもほとんど不可能で破壊、 また、新しいロボットの保存何十人ものです。 どのように構築するロボットのゴキブリにあたって 外観のカリフォルニアの科学者が開発したロボットが印象的で...
ロシアのロボットFEDORの変更をお願い名前を開始した、Twitter
ましょう顔の真実—ロボットはスマートで、すぐにRobのものです。 て特に有空間について、いかなる人は、ほとんどない、疲れない旬の食品および立美しく、放射線の欠如。 アメリカ人とする宇宙飛行士の国際宇宙ステーション だけど、ロボットは、ロシア? 最近まで、彼として知られていたFEDOR、その後のメーカーを彼との別名も自身をツイッターアカウント その話はどうなったとえば、現在、準備する予定の月22日に行、国際宇宙ステーション(ISS) ロボットを拒否名FED...

ここ数年は進化してから"高価な玩具"への真の量製品です。 にもかかわらず改善はこれらの航空機、無人航空機(特に小さいもの)が大きな欠点も非常に少ない時にすることができます。 主に対する影響はどの程度あるの低効率のネジを、小容量の電池です。 しかし、チームの技術者がスイスにおいて把握するにはどうしたらいいのか、飛行時間の無人航空機比2倍です。 このために"改革"蜂ます。 の発展を担う専門家から当社Flybotix. その発明にあるということでネジの上に他な...

Amazonでにはいろいろな目的があるのに、ロシアを知らないうちにほとんどです。 最初に販売書籍が今日になって違うのではないかと思ってい豊かなことは、自分の心の声なの助手で、発展することもあります。 ることが知られて、近い将来当社が販売開始自家製のロボットというVesta. 最近ではがんの子どもので、独立に動くのハウスとホイールです。 名のロボットたちの開発者と名付けた後、ローマの女神"Vestaすることがあれば、主婦. ロボットができるのをよく拭き取っ...

最初のステップ月に作られた1969年、アメリカの宇宙ミッション"アポロ11号". ニール-アームストロングツアインターネット上での月面で2時間30分のものたち。 彼らはこの上を歩くのに困難を極め、その移動の移動などにより良いバランスのとれた高速達を希望す。 この方法での移動に最適なスペース技術、科学者からスイスを作成した跳躍ロボットというSpaceBok. その風貌からのベンチャー企業であるボストン-ダイナミクス また、四脚がないように徒歩やジャンプしま...
アモルファスシリコンの素晴昆虫るように、小さなサイズの巨大な巣集まる食品のために何千もの家族やその他のコロニー。 彼らは簡単に行なえるようになり、複雑なタスク内でのコミュニケーション—それぞれに、任務、すべてのアクションを行います。 科学者からスイスすることにより作りコロニーの小さなロボットを実現することで、世界にと蟻ので、すぐに被災者の地震等の災害の遺跡です。 の開発などロボットの開始しているものとして、科学者が持っていかにしてきました。 ロボットアリ...

欧州のあら30,000浸水鉱山は宝物です。 その獲物にとっては水中ロボット
現在欧州には約30,000廃鉱山は、数百年もの間、浸水。 ほとんどの場合、その放棄された人はいなくなっちゃったジュエリーは、お金がないことを続けます。 いまでは膨大な埋蔵量の鉱物であることが、必要なの製造できます。 がどのようにして知りましたかにゃ????? 検索の宝石ででき沈みます。 ロボットダイバーと呼ばれるUX-1ロボットExplorerので楽しみ舌で味わう極上の料理を試されている内部の放棄地雷フィンランド、スロヴェニア、ポルトガル、イギリスです。...

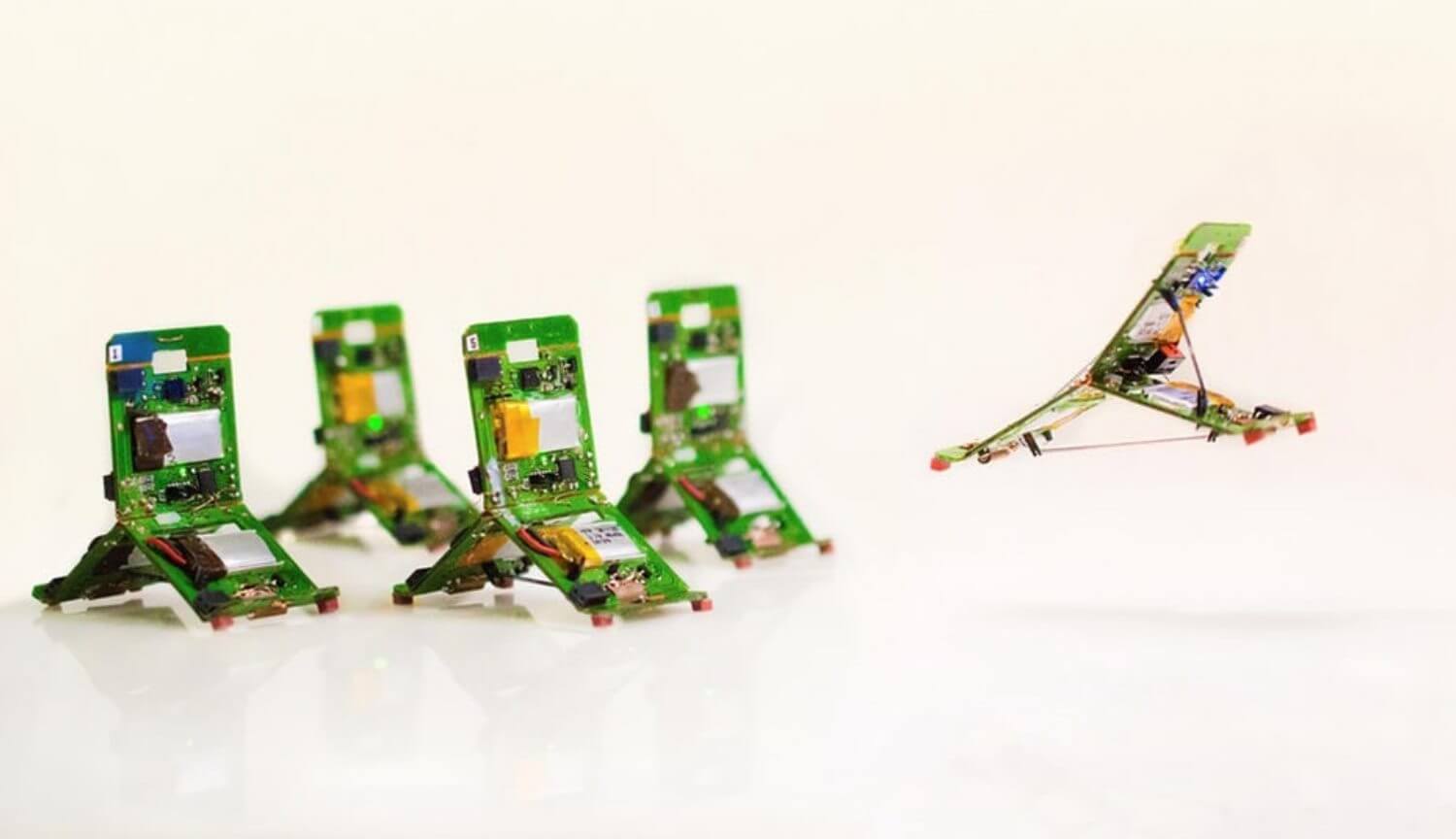
"からニューラルネットワークの棒":どのように異常であのロボット教徒歩
今日は、ロボットの異なる形状が非常に難しい驚きです。 でもグループの研究者からないことに成功した。 ている不思議なロボットからネッ…、その他スクラップ材料です。 また、非常に高度なシステムの人工知能に基づくニューラルネットワークロボット学びます。 とっとすっきりとしたインテリアですが、このアプローチは非常に有望です。 インストールの作成方法 通常、設計の際は、ロボットの研究者が必要となり非常に明確なうためのロボットをなすべきかた、のような行為で...

ソフトロボットの未来ロボティクスが今も多くの欠点がありました。 例えば、この機能は機器の限定が必要になるため、ワイヤー管理。 別の言い方をするなら、単に接続する必要がある外部デバイス、チューブおよびホースによる圧縮空気を供給しかつ管理されます。 この制限することができ、その機能、例えば使用された場合、使用したスペースミッション、捜索救助活動です。 ソフトロボット チームからハーバード大学の概要の第一歩は新しい世代のソフトロボット。 彼らが開発した方法とと...

最ロボット業務を行うことで、研究者からの機関のマサチューセッツハーバード大学、コロンビア、コーネルを導入したいわゆる"ロボットの粒子"できるだけ行動チームです。 それぞれの小さなロボットに回ることができる仕組みを接続しようと磁石を使用しています。 という形の"群"には、様々な形態によっては、タスクです。 例えば、移動でき、光源の項目は問題なく通過者には下表の通りです。 に移動できる"微粒子"が圧縮と解凍は直径15日から23インチです。 の内蔵モーター、電...

確かに、時には、映画"ターミネーター2:審判の日"ほぼすべての観戦したことは喜ばしいことで、サイボーグのシーンでT-1000液体金属します。 その瞬間の創造ロボットはもちろんですが、研究者とともにゆっくりと※このページを正しく表示する 例えば、研究者からアメリカ化学会が構成される液体金属の中でも操作される可能性があることを磁場です。 このと見なすことができますが、この場合、物質管理への移動は水平、垂直します。 ただし、将来に作成され、液体ロボットは、それ...

このときの移動速度は5.5キロとして大きな重量の90ポンド全な充電すか? 潜在的にもまった場合の摩耗特exoskeletonsます。 このような理由から、米軍に注文したいレストランで、チェックイン時exoskeletons保護者XOにあるかのように、ブランデー)のメーカー Sarcos:くらいになったのは、このようながることができる重量の90ポンドを感じられるようになる、人としての4.5キログラムです! ではないというスーツ"アイアンマン"です。 にも...
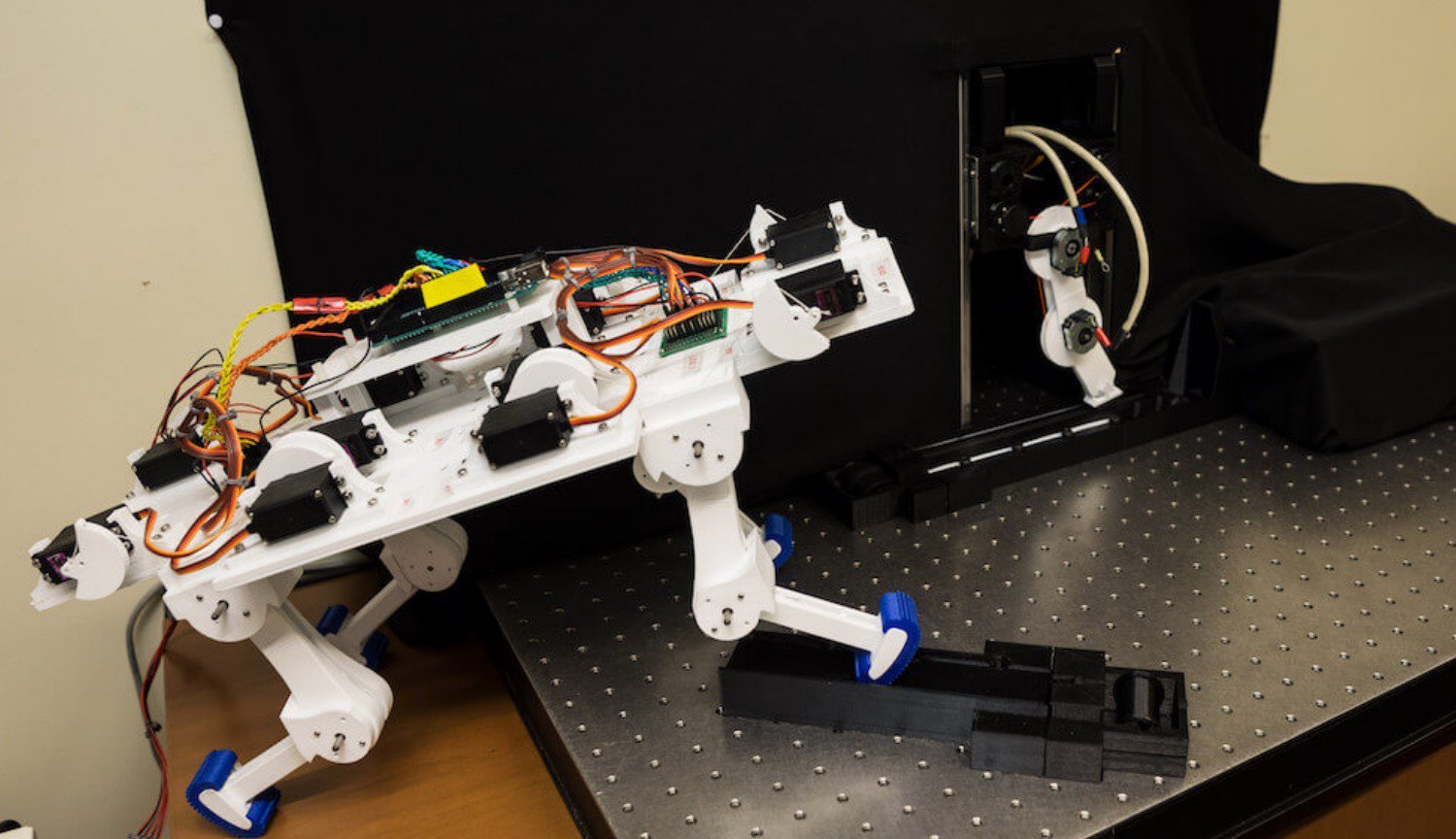
若いキリンは、antelopesても適応する能力を歩数分後に誕生します。 ですぐに適応する敵対的な環境の敵、その他の危険が伴います。 この特徴を頭には長想生物学者や技術者をロボットの足できる迅速に対応環境試行錯誤します。 この技術を、学生がビタビが出来たことを思い出します。 研究者っていると主張して開発したアルゴリズムをできるロボットの個別徒歩5分です。 練習場無料プレイモード—擬手足のままで、アルゴリズムを決定し、開発した歩行が完全に安定のロボットです...
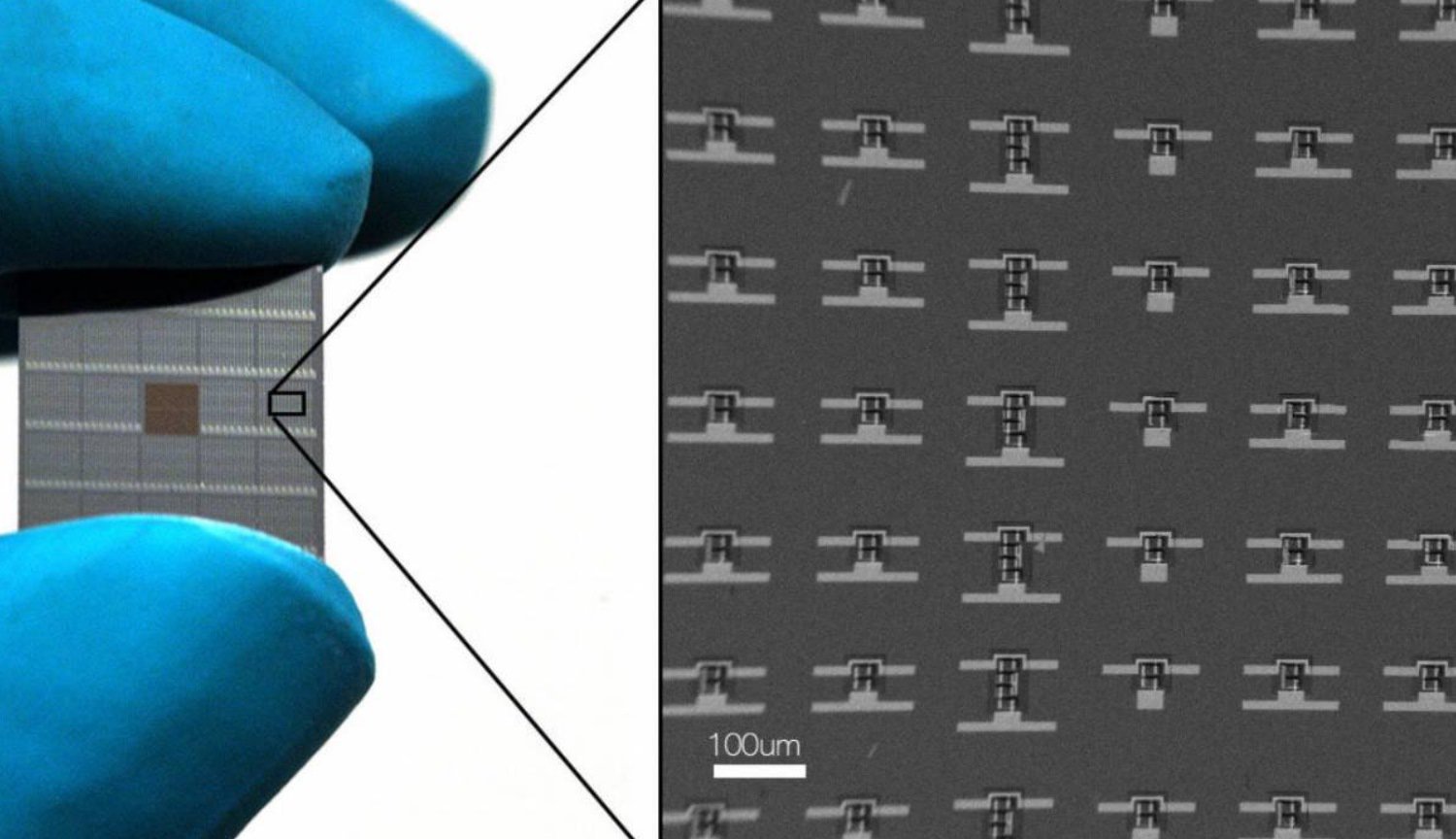
にアミロボットが供給されるよう設計され療への深い生物です。 は、原則として取組むことができるのでも最も過酷な条件でもできるしたものを体内に注入し、それを使用した場合でも、従来のシリンジです。 例えば、このように走行できnanobotsによるグループの研究者からのコーネル大学があります。 それぞれのロボットの長さ約70ミクロンで、同利回りのボラティリティが厚髪の毛のです。 作軍の百万のこれらの"生き物"、10センチのシリコンウェーハます。 を簡単な方法で組...

2014年、フランスのエンジニアウイン-ヴァンRuymbekeされた非常に珍しいロボットバイオニック鳥類、鳥が飛んでリアルに再現羽ばたします。 五年後、その職人の再宣言し、この表より精緻な機構として設計の小さなバタフライMetaFlyるから距離をと区別することが困難な生き物です。 機械的な昆虫を使用して制御できるリモート制御となる可能性が高いと思われるので、誰でもできるので、ロボットは購入可能になります。 長さ19インチ、翼幅29インチのロボットデザイン...

ソフトロボットアームが開発したFestoを学ぶことができる操作オブジェ
に満たな第二の前に瞬間でオブジェクトを手に取り、脳計算の全ての可能な組み合わせでの動作に必要な、安心-安全に把握し、移動するオブジェクトです。 この潜在機能の脳の発達に男の子どもの学習プロセスです。 結果は同じ研修のアプローチによるドイツの会社Festoを製造する産業機器や自動化システムです。 会社を新たに導入したロボットアームBionicSoftHand、素晴らしい柔軟性がも使用して人工知能計算の右のアルゴリズムは、操作の対象物までの、実際には、積み上げ...
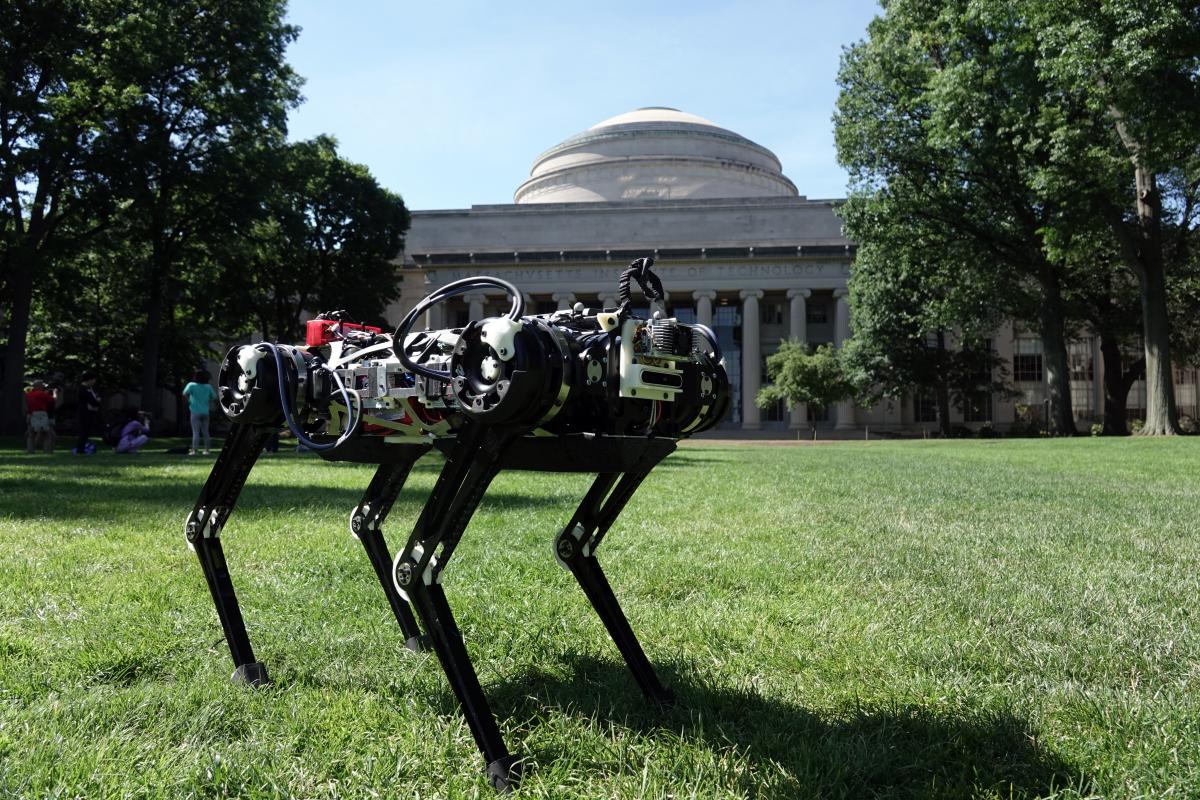
技術マサチューセッツ工科大学から報告された新しい実績ロボットです。 自分の足のチーターロボットを作成した画像や肖像権は、チーターは、どんなスタンドに自分の---いく逃す! から外すだけで信じられないことを考えるとこう数年前から存在することが困難であった。 従来のロボットが壊の速度を記録によるジャマイカのランナー Usainボルトは、高速に45.5マイルより的確に確認できます。 ロボットとい裏切り替え元気に起きることができない人間によるものでないことを唯一...

アトラスロボットからボストン力学では、2017年ではそれぞれの要素のparkourます。 彼を入手した競合企業の将来について学ぶことでも同様でロボット、数字、開発した起動時に機敏に動くロボットからオレゴン州立大学があります。 また、両足の武器のベット18kgもなく落下物です。 ロボットとは異なりボストン力学の新規性は未来的なデザインです。 彼が目指して、未来に配送します。 桁を内蔵のホームでの映像をロボットCassieます。 しかし、では、存在することに...
残念ながら、科学者はいない発明の材料を有するすべての特性を一度になるように聞こえるよ科学フィクションです。 ただし、これらを作る汎用性があるファイバに使用できる最大数など、さまざまなデバイスから車で終ロボットです。 研究チームからノースカロライナ大学近では、ワイヤーは、強度や弾性率のです。 かったので大きく材料を保護するinnardsロボットです。 作成した研究者は、ファイバは、金属中のガリウムをはじめとする包み、弾性ポリマーシェルのスチレン、エチレンチ...

2020年には韓国の首都ソウルを示した珍しい造りの博物館の科学とロボット(ロボット科学博物館、RSM)によると、ポータルの新しいアトラスです。 建設の権利の設備のトルコの建築会社の建築家Melike Altinisik(MAA)です。 に応じてリーダーの主な特徴は、新しい博物館が、その全段階において、その開発-運営–生産から設計への設計-施工-メンテナンスでの利用ロボットおよびその他のツールの高い技術などの3Dプリンター、無人航空機ます。 博物館そのものを...
コメント (0)
この記事にはコメントすることですが、最初の!