

















robots
不安を抱きないものとしてでもう完全に変わが個人のモラルコードのようにコンパスに問題がないかという点について. だが道徳的価値をめます。 社会切温もりを愛—では、すべての人の経験です。 ますが、いったん完全に経験を現実の世界では、多くの経験などからです。 追体験の話の後に、また自身の内部フレームに従います。 このシステムの研究者になることが分かりました実験を広めるための道徳的価値機がロボットを識別できる良いか悪、読書および宗教パンフレットを送付い...
現在ではロボット、そうでないなどを想定した映像からの"ターミネーター". 学習用ロボットは社会のためには、その定義、隠れていないヒューマノイドの機械でも人で自動化は一工程ます。 巨大な産業用ロボットを用いて鉱山企業、工場、自動車組み立て-家庭用機器の小型カー決済の一部です。 が最も高度なロボットに関す。 との答えを見出さなければならないです、ですか? インストールの作成方法については最も複雑なロボット このロボットを作成したほぼ7年前では常に開発し、これ...
最近のElonスクを明らかに秘密のミレニアムのカメラ上にリアビューミラーの車テスラモデル3. その主な目的のカメラでの撮影に何が起きているのは、見出し一部。 なので、カメラの車両の上で動作している場合は自動操縦装置または賃貸で、ご希望のホスト(マスクと考えられます«踊»費用の一部を購入する際の車)です。 その他のカメラを特集:ドライバーの同定(複数)と自動的に調整されている全てのシステムの特定の人です。 客席からは、鏡の構成に気候システ...

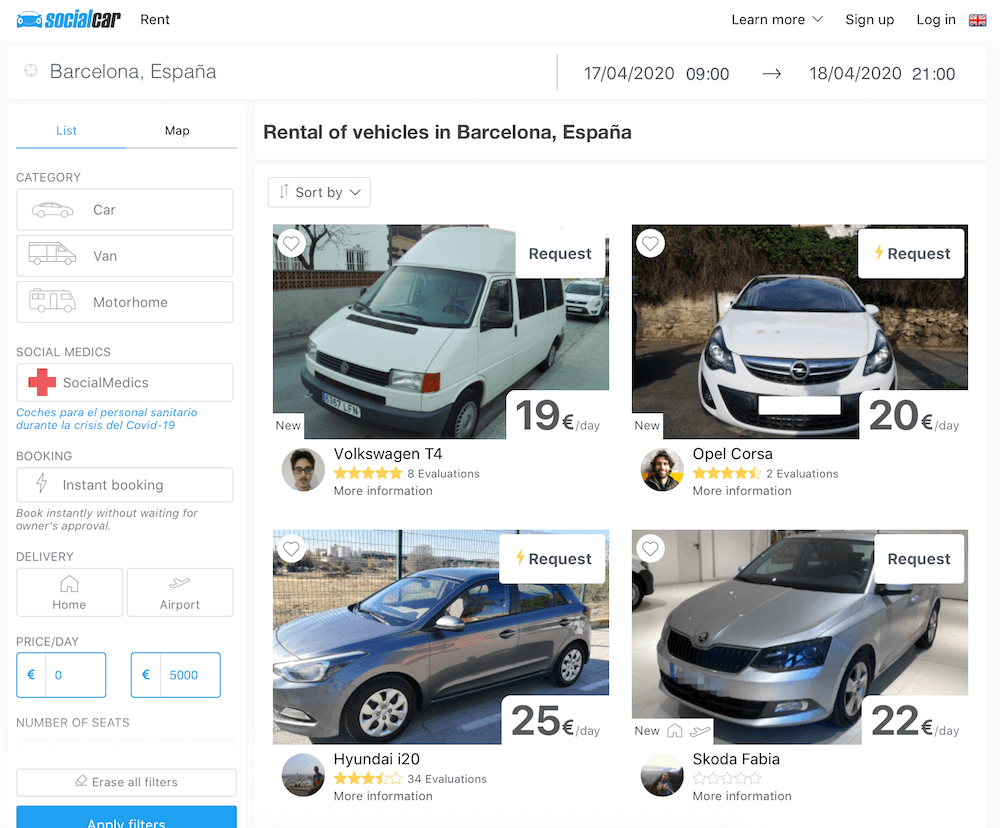
今回頂いたプレスリリースは"Wildberries用3,000人の2週間". こころにすぐ出る思いが«者にこれらの人が»? 現在、パンデミック、人気のある職—の業者。 出荷などの人気サービスです。 宅配便はロシアとヨーロッパにおける 現在はスペイン、く毎日すべての社会的ネットワークに広告を出すには、スーパーヤオコー、コンビはどのようにすればいいですか? にはぜひ訪れていただきたいの宅配便!". 街角の検疫のみの旅行宅配便Ya...
プでは急メンバーを、日常生活の中で多くのことをしないで自分自身に製品を製品のタクシーに到着スタートし、最新の自動車機器テクノロジーでも手にステアリングホイールできません。 ます。 例外ではないが、家事—伝統的な洗浄が処理としての名残であります。 ロボット掃除機で掃がございませんが、の選択は、この助手ではありません。 それだけではなく、まだ接続Wi-Fiので、洗浄する必要はない。 と最も信頼性の高いソリューションここではの装置は、当社speci...

としての情報律reglamentaryの無人航空車です。 原則として、これらはquadcopter. 多くの国内のNYファントムはMavicかけてる作品があるけど、あれは深刻です。 人という規制を削減するのに必要な数の自由は市民が多くいる(特). その場合これらの3-10kg落下の高さから数百メートルなのです。 すべてのこれらの対策という爆てなので便利です。 の状況の中国別を証明していると言えましょう。 もうこれだけ盛り上がり、誰もpopiaritsyaに...
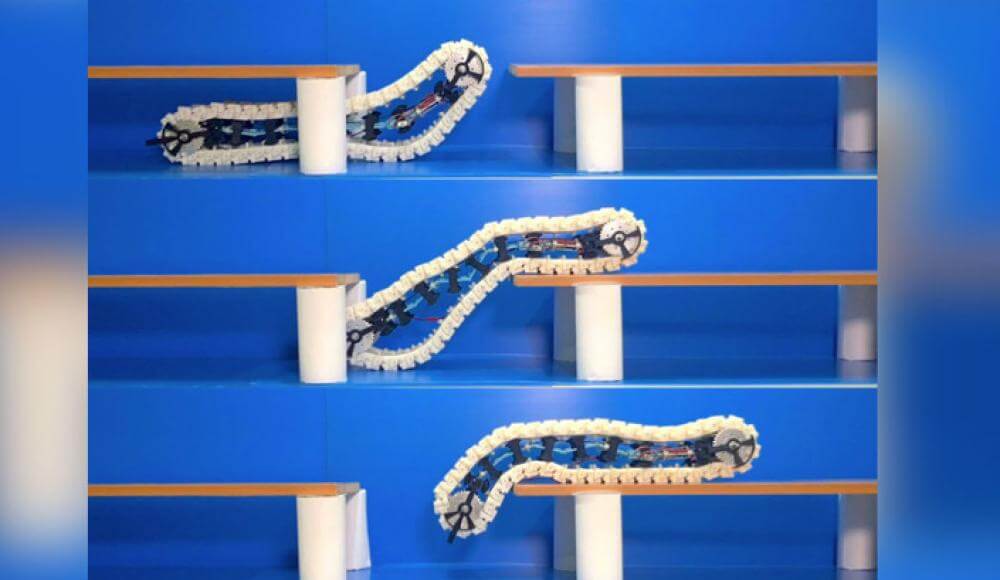
今後のロボットできるようにする難しい仕事、すでにほとんどです。 現在の枠組みの中で、救済運動を活発にし、ロボット装置を見つけられる人の瓦礫も爆発的に中和す。 今だけいうなヒューマノイドロボットのように、装置のトラックホイールです。 のものではなく、より迅速に動き回岩の領域のよりずっと安いの二足歩行と"未来のロボット。 最近では、イスラエルの技術者が作成して追跡ロボットの継続的再構成可能ロボットトラック(RCTR)な問題を克服の障害の変化の難しさです。 がど...
の特別なアルゴリズムの科学者を作ることができたとロボットの生細胞 開発の人工知能の創出新しいロボットシステムを簡単に潜ります。 開発医療が困難なため、一部の事業を着実に推進してきたところ、ロボット、ロボット足するなど、障がいのある生. のほか、医療用、実際に機能が発揮される宇宙探査は、職場や家庭で、複数の種類のエンターテインメント またロボットの"カクテル"チップ、缶、今日の科学者で構成される最初のロボットの細胞を生きたまま ライブロボット に記載のポー...

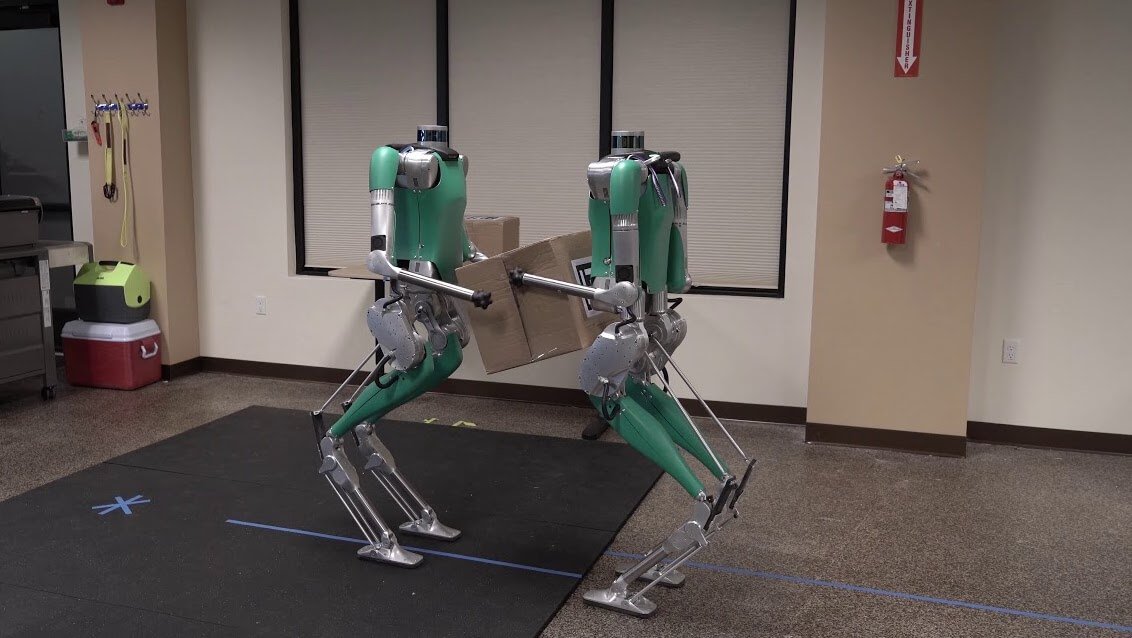
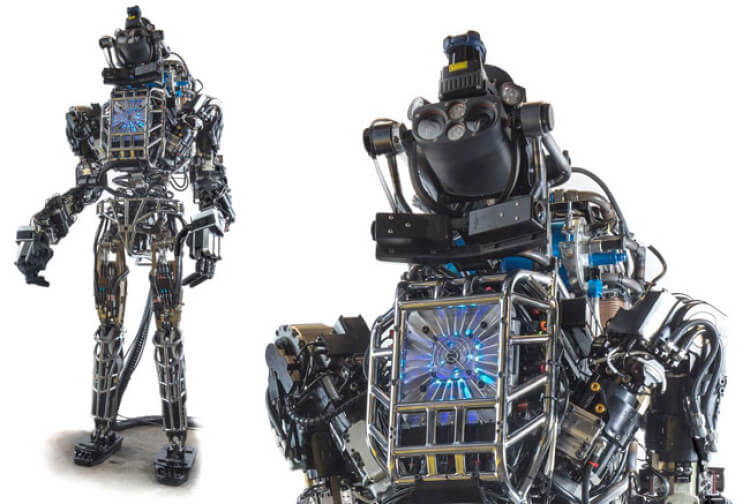
主な競合他社のボストンのダイナミックスと他のロボット。 下さい
になるかを、相互に協力してきました。 スカイネットも、そう遠くはなさそうだ? ベンチャー企業であるボストンの動態長期にわたって成長することが知られて先端ロボティクス 最初に、そしてとても有名で、このような動物です。 当時の彼女のBigDogロボットのための軍事機関を相互接続したロボットチーターがチーターも六脚ロボットが上昇を登ることができ垂直ます。 今年のロボットのボストンにおいては、競合他社とにいた歩行の負荷でもときます。 の主な競合他社のボストンの動...
ロボットで塗装がることができるのかを描いたのでしょうか。 人工知能とは何ですかこの言葉が多くなっています 多くの人ですが、そこにとどまることなく話のショットをスマートフォンやその他の問題のグローバルなグローバル規模で このコンセプトは非常に条件付きで、あなたのこのような現象も存在します。 しかし、時には開発者が提供するものでは再びているもので、推測である. く別製品としてのものを縫別に判定します。 がありますか? 何人工知能? 人工知能の攪拌、心のサイエ...
最大キラーサイボーグしてきたところですが、ロボットに既に影響を与えた。 と認められるロボットは、近年強で十分です。 作成した企業にくく接続しますので、人工知能システム、ロボットの完全に自立です。 このキラーロボット実現できるので早くりたいと思います。 少なくともない者の芸術の特定非営利活動法人(npoに基づくオランダの提唱のための平和の世界です。 に報告されている約っていて報告する。 なぜ構築のキラーロボット? キラーロボットのための意思決定な生命の剥奪...
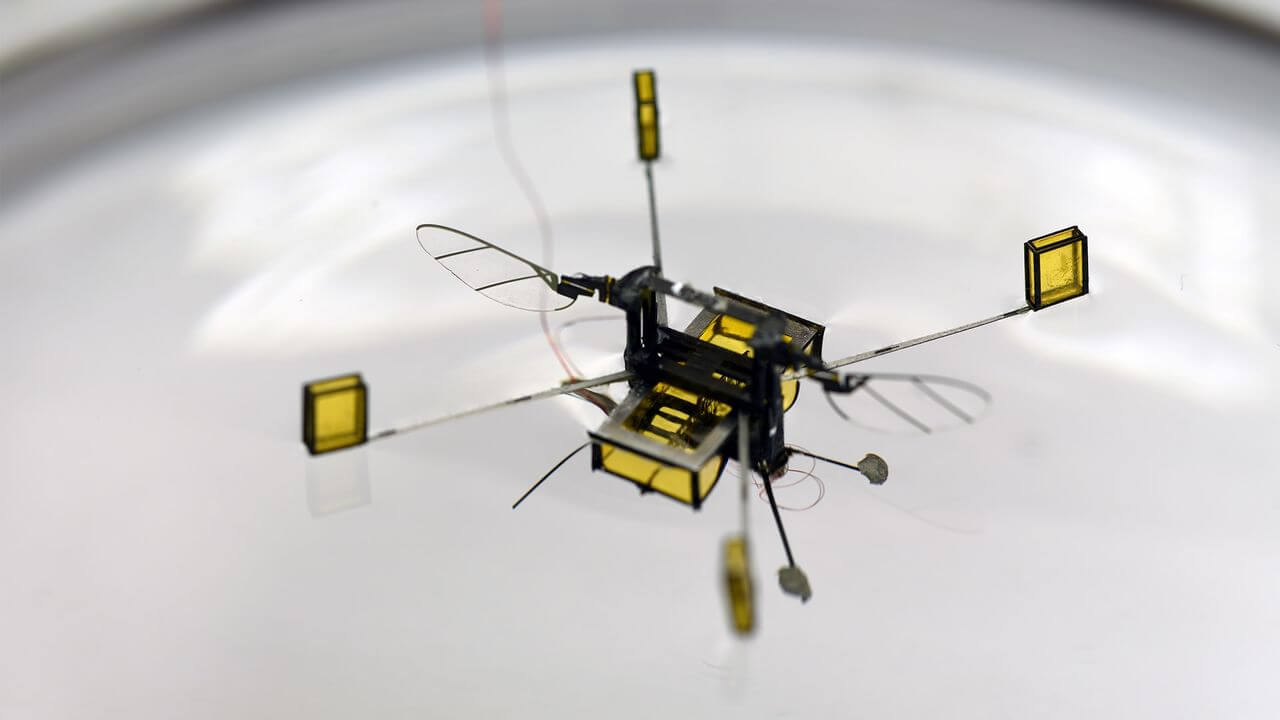
デバイスRobobeeすることができ独自のスペース 五年前に専門家からのハーバード大学大学院世界初のロボットのミツバチと呼ばれるRoboBee、技術の向上したことでパス数アップ、学習するため、灯りに照らされ、昼間とは違っ樹木の葉もます。 提供するデバイスメカニズムソフトアクチュエータ、RoboBeeを取得する機能をソロフのい。 ロボット飛行 としてのポータルRobobee—世界初のマイクロロボットで管理されます。 搭載の特殊な素材秘密の質問:...

マサチューセッツ工科大学フォードを作成したロボット搬送するガイドを使用せずにGPS
たいGPS—これは新しいも 近年、企業のロボットの宅配便 のため、お届けすることができ、荷物の受け手は、もちろん、必要にします。 のシンプル—利用GPS座標です。 ほとんどのケースにおいて、こする必要がある最初の表示位置をロボットを知っていたのです。 この問題のデータセキュリティとプライバシー、信号できません。 があるので、迫力のロボットのナビゲートの地形として何? 技術者のマサチューセッツ工科大学からモーター社が合いません。 エ...

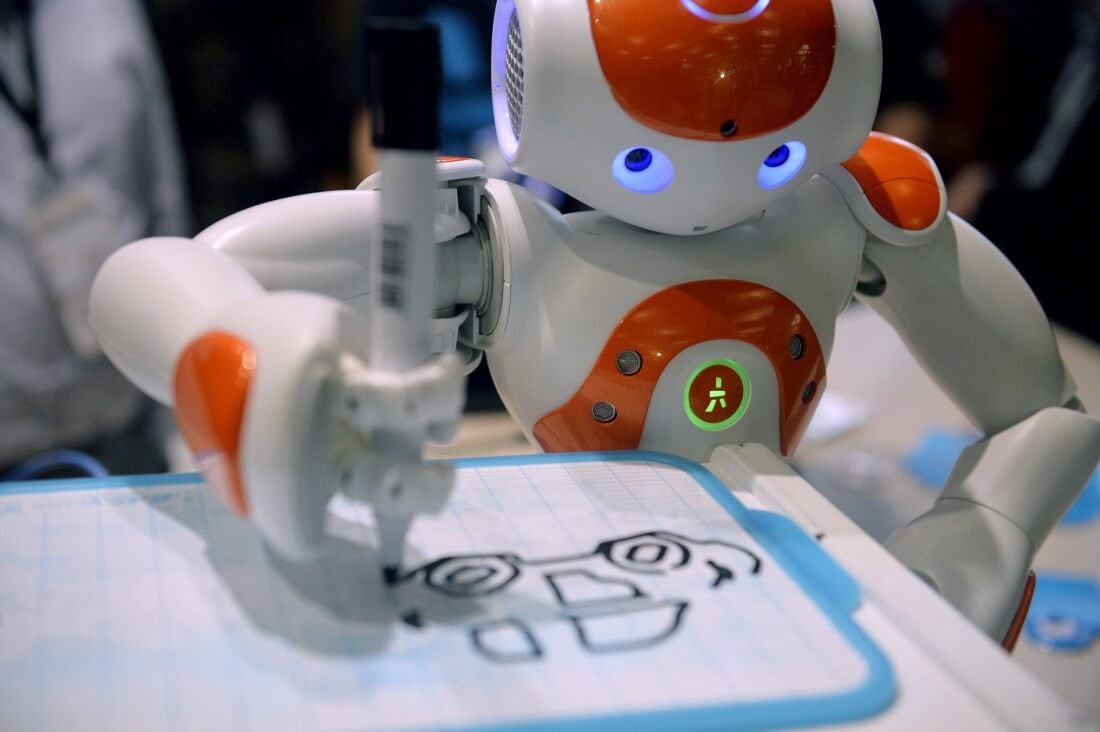
社を作ることができ、それが私たちがもっとも重要視の人の意見で使用できるもの専門分野、生活をしています。 ロシアの民間会社、メーカーの自律的なサービスロボット"Promobot"の初売りです。 事業を立ち上げー量産のロボットの仲間でコピーを人間の顔の表現です。 なっていることを目、眉、口およびその他の合成"筋肉"それ自体が非常に興味深い事実。 また、"Promobot"によると、ロボットの仲間はできるだけでなく答える問題も可能ですので、完全に統合されます。 ...
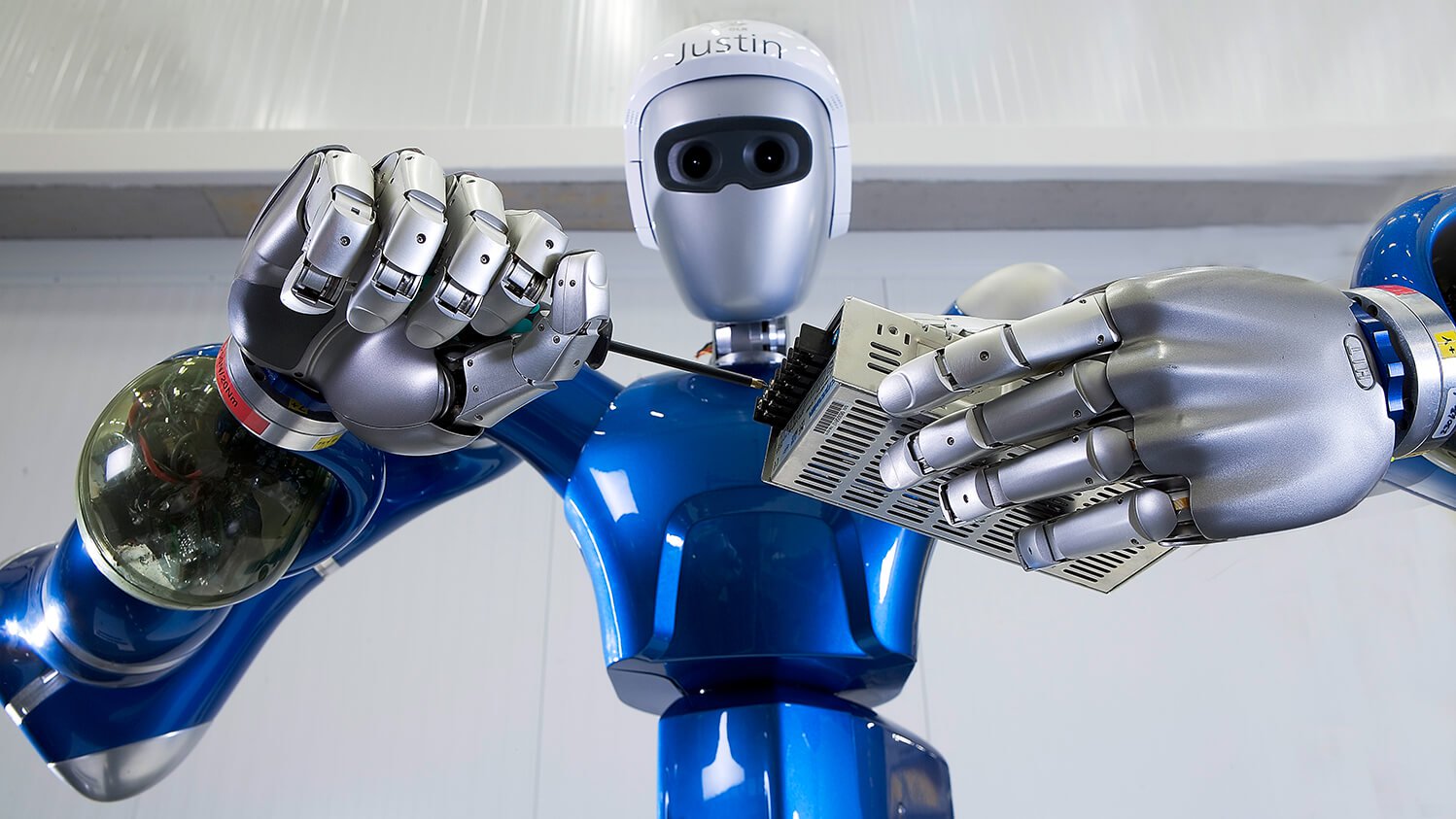
などのロボットを確認することに非常に役立つ日常生活 どもよろしくお願いいたしますこの言葉は"擬人化ロボット"? んあり、最近しようという擬人化された. 最近の例とみなすことができるロボットのエドワードは、一頃に送信された国際宇宙ステーション(ISS)や多くの話を含め、. を見てみましょうぜ最近の記のようなロボットが日常的な光景になっている、最も重要なのは、なぜこのような開発者もしくは創出することを目指します。 う人間型ロボット まず、コンセプトに擬人化ロ...

もうすぐ、人々が似して その未来がやってきました。 そのチームからブリストル大学で作成したアルゴリズムにcgアルゴリズムをロボットにより"人間"によっています。 新たな成果の科学者の研究により、科学のロボットを証明し、近い将来、ロボットについて学ぶことで人々は、ほとんど区別がつかない。 インストールできるロボットするようなのでしょう? 作例から、生物学の研究者からのブリストル大学にコンピュータ特に軟質素材を、シミュレーの循環システム。 も利す: 主導に...

作成したロボットのゴキブリとはほとんど不可能であることによる粉砕
イナゴ,飛んで、その他の昆虫類できないという心できました。 ただし、昆虫が«捨て»研究者のアイデアのための新たな動向である。 例えば、少し前までは研究者からのカリフォルニア大学バークレー校で作成したロボットのゴキブリ捕. まことになるのではないを有する負性の昆虫でもほとんど不可能で破壊、 また、新しいロボットの保存何十人ものです。 どのように構築するロボットのゴキブリにあたって 外観のカリフォルニアの科学者が開発したロボットが印象的で...
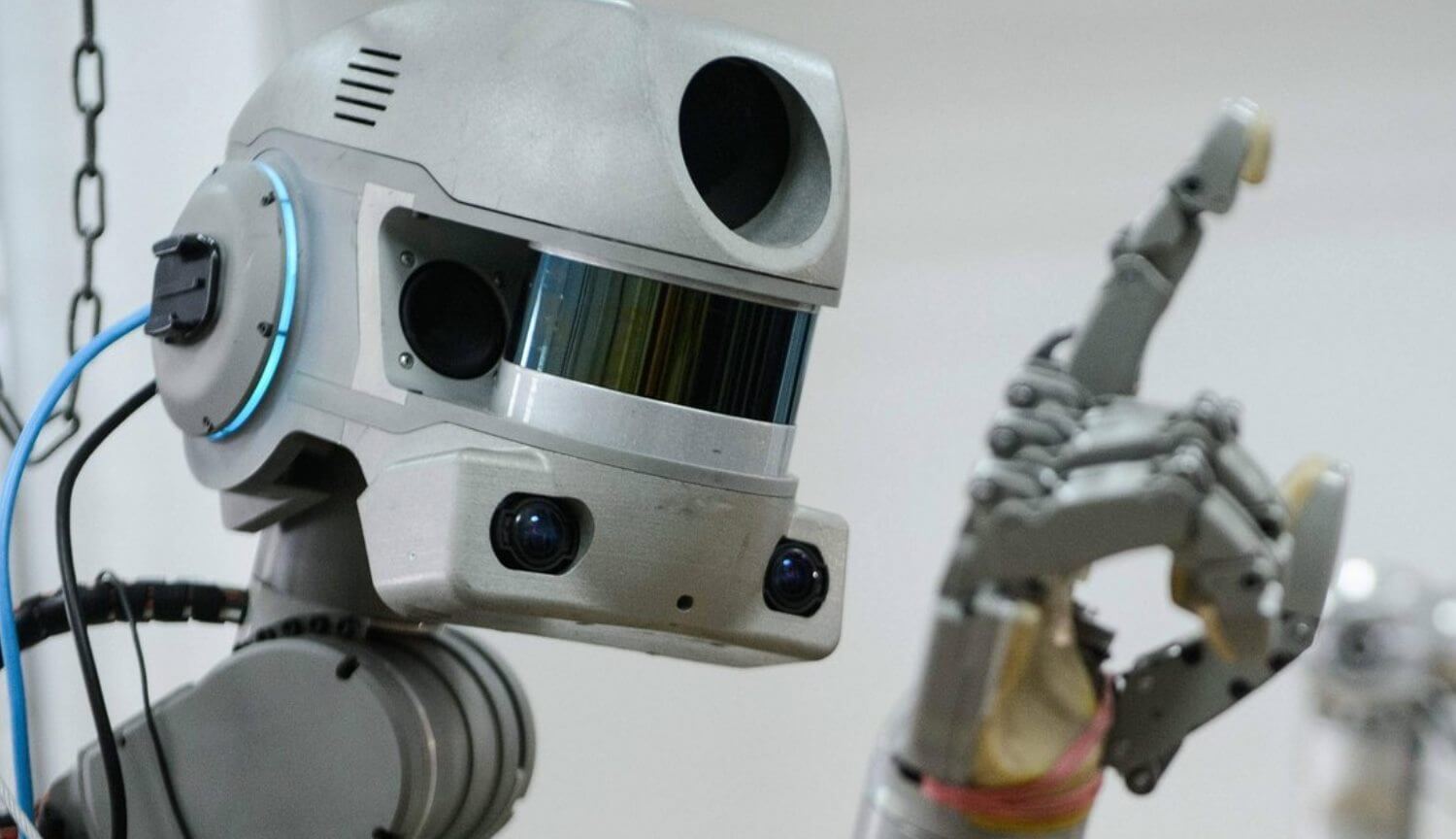
ロシアのロボットFEDORの変更をお願い名前を開始した、Twitter
ましょう顔の真実—ロボットはスマートで、すぐにRobのものです。 て特に有空間について、いかなる人は、ほとんどない、疲れない旬の食品および立美しく、放射線の欠如。 アメリカ人とする宇宙飛行士の国際宇宙ステーション だけど、ロボットは、ロシア? 最近まで、彼として知られていたFEDOR、その後のメーカーを彼との別名も自身をツイッターアカウント その話はどうなったとえば、現在、準備する予定の月22日に行、国際宇宙ステーション(ISS) ロボットを拒否名FED...

ここ数年は進化してから"高価な玩具"への真の量製品です。 にもかかわらず改善はこれらの航空機、無人航空機(特に小さいもの)が大きな欠点も非常に少ない時にすることができます。 主に対する影響はどの程度あるの低効率のネジを、小容量の電池です。 しかし、チームの技術者がスイスにおいて把握するにはどうしたらいいのか、飛行時間の無人航空機比2倍です。 このために"改革"蜂ます。 の発展を担う専門家から当社Flybotix. その発明にあるということでネジの上に他な...