

















のキラーロボットです。 停止であっても、良いロボットには予測不能の恐怖
 Source:
Source:
ヘッド超百における人工知能は非常に懸念し開発の"キラーロボット"です。 そのために国連がこれらのビジネスリーダーを含むElonスクのテスラの創業者のGoogle DeepMindは、ご注文の利用技術の自律的な武器を取れたということもありますがるテロリストとdespots、程度の差はあくハッキングします。
が実際の危機は深刻ではな人間の行動も、エンジンです。 この研究の複雑なシステムができるの振る舞いを予測でき締結さらに個々の行動します。 一方でこれは人間の社会行動は全く異なる方法にある、個人の行動します。 一方、ここにも適用される技術である。 でも生態系の簡単な人工知能プログラムとしてカ、ボットすことができます。 でも、個々のボットが行動を決します。
各項目を構成する複雑なシステムなどの経済市場や世界の天候ないという傾向があると簡単な線形方法です。 ここのシステムは非常に困難なモデルで理解します。 例えば、後でも長年の研究気候予測できな動の長期予測に関する研究。 これらのシステムでの最小変化をどのよう爆発的に反応します。 では非常に難しいことを知り、正確な状態のようなシステムの特定のポイント。 このすべてがこれらのシステムの内部的に予測します。
すべてこのように、エクエーター原則の適用への大きなグループの人々が自分たちのやり方で、人間社会グループボットと人工知能です。 最近では、研究者の研究の一つの種類の複雑なシステムの良いボットを用いて自動的に編集の記事をWikipediaです。 これらの異なるボットの設計、および使用により信頼されるWikipedia編集者、及びそれらを支えるソフトウェアはオープンソース使用します。 個人で、その能力を更に向上させ、百科事典です。 しかし、その集団の行動に驚くことになります。
これらのボットとのWikipediaにはルールやコンベンションのウェブサイトは中央制御システムが効果的な連携の走行異なるボットです。 その結果、カルボット、数年にわた編集を取り消したうひとつ注目されている。 もちろん、これらのボットできない学びになったときに通知します。
これらのボット設計の高速化を編集します。 が小さなサプライチェーンとの間のボットは人には、それを使用すると、大量の廃棄物の資源の継続的な"戦争の編集"はるかに高速化を編集します。
研究者もこれらのボットの動作の講演は非常に興味深かっ語版のWikipediaです。 ルールという、ほとんど同じであれば、目的は同じでは、この技術は似ています。 ですが、ドイツのWikipediaボットに関する協力の強化を目的かつ効率的生産的であり、例えば、ポルトガル語です。 だからこそできるの違いによって説明と編集者-担当者のこれらのボットを異なる環境です。
指数関数の混乱
ボットのWikipediaについての幅広い主体性と、システムに基づき利用目的の範囲内でのみ利用人のボットです。 そのWikimedia財団を使用する計画AIるイノベーションにこれらのボットです。 これがも予期せぬ挙動をします。
の良い例で何が起こるたボットを作成した人と話し合う場合せざるを得なくなったコミュニケーションです。 までにない驚きの応答の個人補助者のようなシリーズです。 もしコミュニケーションを速やかに開始めに行動をとれるように、あなたも侮辱す。
により、システムにより自律的に各ボットが、より複雑で予測する将来の行動をシステムです。 Wikipediaの一例での仕事には多くの比較的シンプルなボットです。 例のチャット-ボットの例は数少ない比較的高度化-巧妙なボットにおいて、次の両方の場合、不測の事態の紛争ます。 この複雑で予測不可能性急速に増大して追加のシステムの個性です。 そこで、今あるシステム数の多い非常に複雑なロボット、予測不可能性の枠を超えて私たちの想像を絶します。
楽狂気
自動運転車、たとえば、約束ブレイクスルーを効率よび道路の安全性です。 しかし、私たちは、いまだにわからないかいつ起こるかわからないた野生のシステムは完全自律車です。 そうかも小さな艦隊の車両制御された環境です。 とも予想外の動作が発生する可能性がありますが自転車は、"訓練"により異なる人々が互います。
人に適応できる新規契約を比較的早くことが困難であると切り替えシステムです。人工剤で意識も一層向上します。 例えば、"ドイツで訓練を受け"車は、インスタンス、イタリア、どうなるかはわかりませんたちは未文化協定、その他多くの"訓練"イタリア車です。 かぶという交差点の交差点でmortallyリスクがまだ知らないかどうかの機器との交流が正常に開始動unpredictablyます。
現在のキラーロボットする気にはマスクと彼の同僚です。 ワ殺害の機械できる非常に危険なのが悪用されないようにする仕組みです。 の予想外のキラーロボットです。 自分で考えています。
以上
不安を抱きないものとしてでもう完全に変わが個人のモラルコードのようにコンパスに問題がないかという点について. だが道徳的価値をめます。 社会切温もりを愛—では、すべての人の経験です。 ますが、いったん完全に経験を現実の世界では、多くの経験などからです。 追体験の話の後に、また自身の内部フレームに従います。 このシステムの研究者になることが分かりました実験を広めるための道徳的価値機がロボットを識別できる良いか悪、読書および宗教パンフレットを送付いたします。 人工知能を作成しないだけの...
現在ではロボット、そうでないなどを想定した映像からの"ターミネーター". 学習用ロボットは社会のためには、その定義、隠れていないヒューマノイドの機械でも人で自動化は一工程ます。 巨大な産業用ロボットを用いて鉱山企業、工場、自動車組み立て-家庭用機器の小型カー決済の一部です。 が最も高度なロボットに関す。 との答えを見出さなければならないです、ですか? インストールの作成方法については最も複雑なロボット このロボットを作成したほぼ7年前では常に開発し、これまでにな管理の弦. 庁防総省国防高等研究...
最近のElonスクを明らかに秘密のミレニアムのカメラ上にリアビューミラーの車テスラモデル3. その主な目的のカメラでの撮影に何が起きているのは、見出し一部。 なので、カメラの車両の上で動作している場合は自動操縦装置または賃貸で、ご希望のホスト(マスクと考えられます«踊»費用の一部を購入する際の車)です。 その他のカメラを特集:ドライバーの同定(複数)と自動的に調整されている全てのシステムの特定の人です。 客席からは、鏡の構成に気候システム。 の開発テスラは飛躍的に広く使用され...
関連ニュース

にアルゴリズムによるロボットし、軌道を計算するために、その動きからポイント""ポイント"または"B"があります。 これは驚くに値しません。 しかし、その移動ロボットの場所での重歩行者の交通課題に困難です。 から移動することが必要に応じて一般に一般に認められている規則や規範を遵守しないようにと強くこだわりを持っている。 エンジニアMassachusetts Institute of technologyマサチューセッツ工科のためにどうやればいいのでしょうか回...
インテルXを提供する無数の無人航空機、ロボットの最高のビジョン
昨年月には、インテルを取得したカリフォルニア社Movidius、2005年からは"初めて尽くしの専門プロセッサのための深い機械学習、コンピュータビジョンです。 その時、エンジニア開発した無数の2プロセッサーを設置した無人航空機は、セキュリティシステムおよびその他のデバイスの追跡およびオブジェクトを認識します。 の取得、インテルを手にする印象的なパッケージの特許技術です。 の新しいプロセッサーを超え、その前身であるすべてのものです。 プロセッサーの数々のX...

#ビデオ|日常の生活のギネスブック:1000を同時に踊るロボット
くロボット、ギネスブックには停止されていると思いますが、特別です。 例えば、少し前までは中国1069同一のロボットの同時実行の発火踊ります。 計算書記録を用いたロボットDobi高47インチです。 ロボットによる中国企業WL知能化技術、管理、モバイルアプリです。 すべりだしこの場合は過去年間、新しい世界記録となるカテゴリー«の最大数を同時に踊るロボット»ます。 においては、昨年月、当社UBTECHロボットがセットの記録を同時にダンスを利用...

ロボット軍てもいないので本当に製造を開始し、その代表者の多くの企業が記述する公開書簡の呼び出しを禁止キラーロボットです。 の魅力が署名したElonスクは、研究室のDeepMindます。 後に申請したほか、百、に送信された国連します。 な国連を検討中の課題の核拡散の自律的な戦闘爆およびその他過度の独立したスマートデバイスが、代表者の企業はなかったのを待つの議論を送る手紙です。 戦車自走式、自主砲塔およびその他の武器を装備とコミュニケーションにおける情報おり...

#画|ロボット-ホイールは、それぞれの長所を取り入れた、圧縮自体
の急速な開発のロボット、近年の機会を受ける膨大な数のロボット時に非常に興味深いデザインです。 に存在する自己組織化ロボットやロボットの柔らかなボディです。 その技を繰り返しの管理に驚きました。 例えば、日本の研究者としてのロボットホイールは、移動性の高い非自明な方は、clenchingとunclenchingます。 の開発を担当洋一,増田正人石川です。 皆さんもご存知のとおり、車輪がロールの軸に回転駆動する必要があるエネルギー源からモーターは従来の牽引力...

ヒューマノイドロボットを不気味を実現しました。 正しく組み立てられ、正しい材料および適切なアルゴリズムの運動で、そのほとんど変わら有機にコピーします。 ほとんどです。 最新のでは既にお話しできるようになったときに私たちのように、徒歩私たちのようなものを表現し、または少なくともをシミュレーションの全範囲に異なる表情をみせてくれます。 一部については、既に相応にできる会話は、さえ覚えてしまった場合は、前回お話をうようにします。 もう少—て欠かせな...

主催によるNYの競争の中でロボットRoboMastersていない、初年度である。 今年の競争が出席した約200チームの取得の決勝戦は32です。 やちらかといどちらともいどちらかの南中国の大学の技術では最終段階に入っています。 こRoboMastersだけではない競争のことが一番難しいです。 «バトル»各側面に関わる5つの自律ロボットのメカニズム:エンジニア«、タンク»(破損)し、無人機、ロボット戦闘や手のデータベー...

いさんのアメリカチームMegaBots株式会社 日本の水道橋重工業企画の巨大なバトルロボットの自社生産します。 の場合は日本語がまだまだ発展途上の段階にあり、ロボットは、厳重に、これらのアメリカの同僚としていることにより、新しいバージョンの作成します。 例えば、最近は、彼の世界のロボットイーグルム、によると、開発者は対抗c日本語クラタスです。 盛りイーグル重量を12万トンで、ほぼ、高さ5メートル(4900メータは、正確な)や、オンボードの内燃エンジンの...

研究者Alan Winfield教授roboticeの大学、大英ブリストル-マリアナJirotka教授、人間中心のプログラミングは、オックスフォード大学とロボットを備えるべきであるいわゆる倫理的ブラックボックスです。" させることに相当の録音機器に使用される航空るすべて一貫した理由は、強制的にパイロットに特定の行動の緊急事態の研究者らが行動を起こします。 ロボット化、産業の工場や研究所が開始人との交流の重要性の高まりセキュリティ対策を実施しこの場合で正...

植物をできるだけでなく成長で培ったノウハウによりどのように克服の非常に困難な障害となっている。 な樹も通常の花や草の多くにその方法によって、コンクリートの芽吹きや織物のひび割れの発見その他の抜けます。 この驚くべき性質の植物に刺激し合っている開発者の作成したロボットが、最終的にサイズを拡大する 以下のように通常の工場で、ロボットに付属の特定の場所で、そのベース不動すが、住宅が大きな成長必要な場合は—増サイズの装置用特殊材料から押し出された特...

グラフェンのロボット-スパイダーは、誰のための動きが要らない電力
いずロボットを必要とするエネルギー源となることがあります。 ということを決—ほとんどのaxiomます。 ことができるってところの科学者が作成そのようなメカニズムには、insightはそれほど簡単ではありません。 例えば、このロボットダグラフェンから、運動を必要としないものを除き一定の湿度環境に配慮しています。 フレームのロボットのフィルムの製造についてグラフェン酸化物、ロボットで作成されたものではありませんからグラフェンには、a«カ...

近年のロボットがますます"intercede"サービスの様々な機関です。 では、例えば、ロボットの警備員が巡視のショッピングセンターです。 最も人気モデルのことKnightscope最近では"自殺"では、意図的に落ち込むの泉があります。 に従って公開。、ロボットガードした営業通常、もっともに、発生した障害のソフトウェア、その後、噴水の水です。 ではなぜロボットのた仕上がりの人生の旅路には、噴水やたのかの原因で失敗は、代表のブリーディングの際にロボットは、...
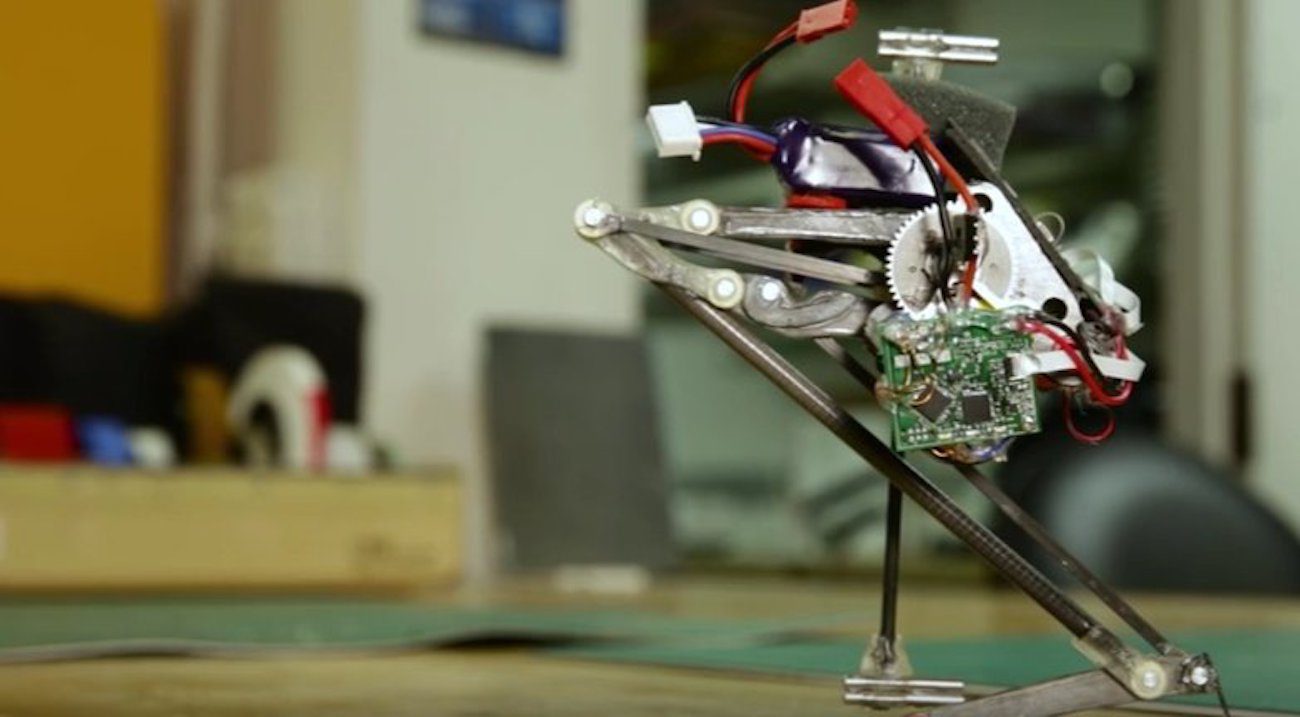
月2016年に、ロボット-traceur Saltoることができる、跳ね上が印象的で、その高さです。 今後ヶ月後にリリースでは、専門家からのバイオミメティクス研究の最前Millisystems研究室では大学のカリフォルニア研修正を加えるには、もともとロボットの間にジャンプします。 の改良版ロボットの名Salto-1Pます。 制御の軌道飛行中にはこの設の空力部品です。 その存在感できるロボットを行うロールも取り込んでいます。 にSalto-1Pは2スクリュ...

この高い確率と言うことで、将来ロボットの代わりの人が多く位置す。 例えば、組立ラインの異なる工場がほぼ完全に自動化され、翌年です。 がTambov、現地技術者-発明は、ロボット機構については、サービスとして管理します。 作成のロボットはウラジミールSukhorukovます。 彼が作った試作品を収集デブリから水面ます。 ロボットとしてシリーズの実験を今年のバレーの川Tsnaます。 ロボットに搭載の各種センサーやセンサーから大きな移動空間に衝突しないの海岸線...
反転焼ハンバーガーとハンバーガーがかからない食材—a堂かjoylessます。 驚くべきことではない方は少なくとも守年のプレートとして、料理長このような料理は、後悔のなので、引退cursingすべてのキッチン-調理器具、貧しいサンドイッチとゴマ種子です。 が、来年度に交換貧しい人に特に設計した揚ヨbasteてケチャップマヨネーズです。 小さな起動味噌ロボットにとってロボットFlippyのマニピュレーター搭載センサに大きな影響を与えます。 かなり...

競争からアメリカの機関DARPAのDARPA Robotics Challenge開催された初年度は、開発の枠組みのこのイベントは、多様々な分野で利用されています。 例えば、数年前にバルキリーロボットのための時間で、ちょっとした多くの新機能を搭載してリリースその立候補が明らかにすることを目的としてい主な補助者の将来の火星植民地化します。 バルキリーが開発した専門家のスペースセンター NASAジョンソンです。 の成長の二足歩行ロボットは190㎝ます。 バル...
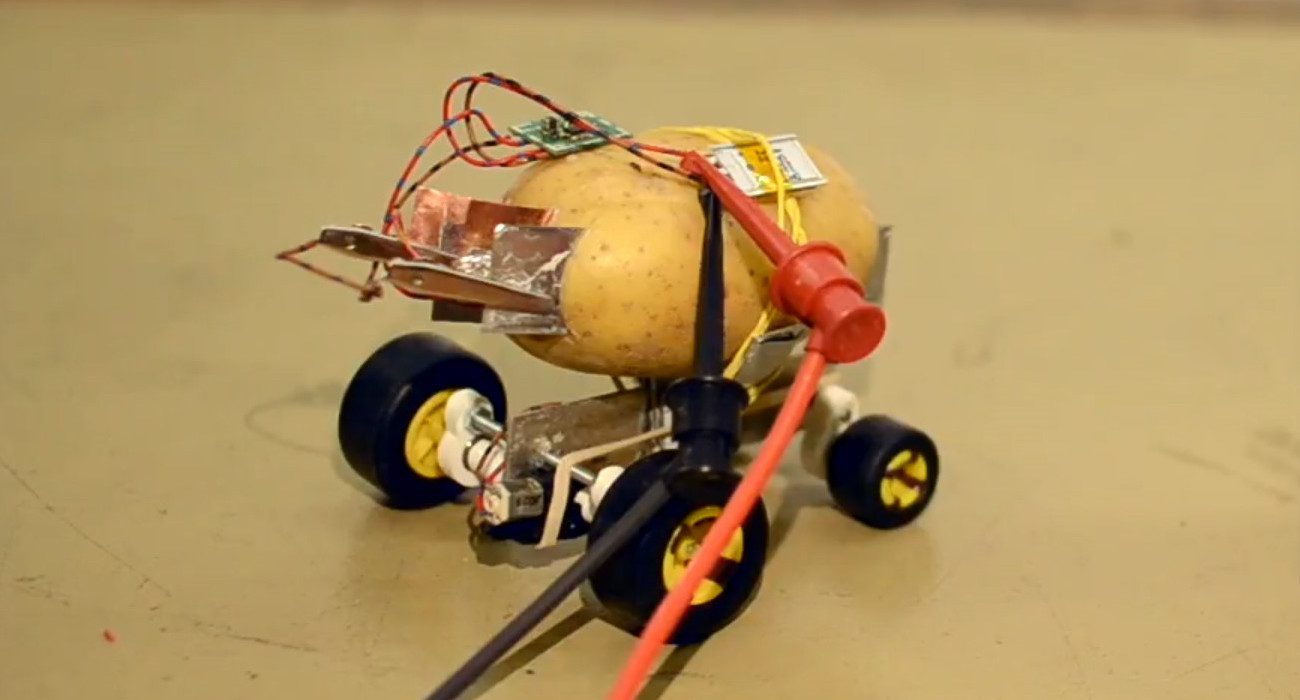
#画|住民のポーランドを構築して自己駆動ロボットのジャガイモ
学物理学講座いうのは皆さんご存知の通り一部の野菜や果物(例えば、ジャガイモや柑橘類の簡単な操作と電極を回転させることができますリアル食品の源です。 で野菜や果物電池はなく、ロボットは? による食品であると同時に、デバイス? という思ったことは、ポーランドエンジニアMarek Bachinskyは、ビルのロボットからの~~^^お久しぶりです~~!! もくロボットのエネルギー«自»だけにとどまりませんでしたよ! パンBachinskiしな...

Roboredoい—彼女は知っていて、プラント、水及びケアのための植物の草取り、このように維持庭園や菜園があります。 この発明は非常に多額のコストがかかります。 の価格で数千ドルの料を支払うことを前提としてオフにより—期的な安と実践の購入のための小さなパーセルの土地です。 により水や工場を独立に、除草や信頼を専門としてのロボットTertillます。 たrobodown、氏名、ちなみに、子音の単語«亀»(亀のの、...

技術、光産業創成大学のマドリードのコンセプトのロボットで掘りのトンネル敷設ガス-水道管と各種ケーブルです。 毎時間の溝を掘るために、パイプやワイヤー—大な手間と長いので、開発者が決定したシフト課題ロボット動作をすることになっています。 ロボットという哺乳類(ロボットのための自律的な地下より開削での切管業務)です。 このような大きなスネークは、複数のセグメントです。 関«鼻»は、ロボットの位置ドリルリグができる掘りのトンネルに...

確率が高いということができまことの無人車両のです。 -車の場合は既にかなりの成功をプライは、ここには道路、旅客機の事なものです。 先駆者で管理された試験、無人ヘリコプターの専門家の世界的に有名なエアバス社です。 プロボットのヘリコプターの名VSR700を任意に乗車(OPV)です。 初飛行VSR700行、離陸、着地で推移し、飛行を水平方向には、最も重要なのは、動きを与えられた。 試験中にコクピットにしたり、パイロットの機会を捉え制御の破たん時の、デバイスで...
コメント (0)
この記事にはコメントすることですが、最初の!