

















10問の問題ロボットのために、次の10年
 Source:
Source:
ロボットは目覚ましい発展を遂げたが、近年では、車は多くの障害を前に緊密に来ます。 の研究チームロボットを識別ハグランドチャレンジする取り組む必要があることを実現します。 の編集の雑誌を行オンライン調査未解決問題ロボットのインタビューを行グループの業界の専門家です。
新材料、組立図面
ロボットの開始から伝統的なモータ、ギヤやセンサーの実験的要素などの人工筋肉、ソフトロボットの新しい方法の集合体を複数の機能を一つの材料です。 もののリストはこれらの成果なの舞台のエレクトロポレーションでの合併のは時期尚早であるが、教えてくれます。
多機能素材の融合の感度は、運動エネルギーハーベスティングまたは保存できるか、デザインをより効果的なロボットです。 その組み合わせ、これらの機能の一つの機械が必要にな新しい組み合わせマイクロ-マクロスケールの組立技術です。 期待できるもうひとつの鉄鋼材料は、経時変化に対応できまたは回復方が、この地域が必要であり研究します。
Viewdocsonline-biohybridロボット
自然が既に解決の多くの問題に首をかしげロボット、その多くが生物学に検索インスピレーションのものを含む生命システムにロボットです。 しかし、その複製の機械的性能の筋肉の力で生命システムを単独で送りの人が"狭い場所"を開発します。
地域の人工筋肉を見て大きな進展が、その強度は、効率化、エネルギー密度の電力の有効性の向上に努めます。 の導入細胞へのロボットに乗せることにより、小型ロボット用生物学的特徴などの自己修復機構築覚の導入などの成分で複雑な作業です。 この成長"roboscope"についての秘密は、自然が必要で行う動物、純粋に飛行、カーナビのマルチモーダルムです。
電力-エネルギー
エネルギー貯蔵—ネックのためのモバイルロボットです。 の需要拡大のための無人航空機、電気自動車や再生可能エネルギーの推進の分野での電池の基本的な問題はほとんど変わっていない。
これと並行して電池開発には必要最小限のエネルギー消費量のロボットおよび艤装いながら新しいエネルギーである。 にロボットの能力エネルギーの利用の環境-エネルギー移動を無線でこれらの二つの有望なアプローチは積極的に研究します。
群のロボット
群の簡単なロボットが利用できる各種構成を解決するための各種問題、安価で柔軟に代わる大型の専門的なロボットです。 小型で、安価で強力な機器を簡単にロボットによって周囲の環境を伝え合わせ愛シミュレーションできるこのような挙動が既に存在する天然の群れです。
必要なものより多くの作業効果的な形状のガバナンスの異なるスケール—小さな群れ制御できる集中が大きく集中します。 でも耐久性、適応性が変化する現実世界の条件で耐故意または偶発的な損害ます。 また、業務上の群れの不均質ロボットの追加機能します。
ナビゲーションや探査にあたって
キー用ロボットの研究所が取得できな人には、たとえば、深い海では、スペースまたは被災地です。 することが要求される熟練の探索、ナビな地図をよく混沌とした、敵対的な環境です。
主要課題として、システムに適応できる学習し、回復から断層ナビゲーションの力を認識する新しい発見が生まれます。 ことが必要である高いレベルの自治すことができ、ロボットのモニターを再度自分の絵の世界に複数のデータソースから異なる信頼性と精度です。
愛のロボット
深層学習として機能パターンを認識し、スキーマの新しいレベルで必要と連動することで擬似推論の創出-適応可能なロボットで学習ができます。
ここで重要なのは、作AIることを認識し、独自の制限およびこの学習の新しいものです。 することも重要できる体制が構築できる学習を迅速に限られたデータではなく単位百万使用された例は深い学習です。 さらなる発展のレベルで理解する上で、人間の知能に必要なこれらの問題を解決します。
脳-コンピュータのインターフェース
脳-コンピュータのインターフェースは透明管理、開発したロボット補綴物をより速く、より自然にそのような指導を行ロボットに貢献しているだけでは解の精神状態の人にします。
現への取り組みの測定脳活動が高く、不器用なので、その設計をコンパクト、人間工学に基づいた無線装置です。 これには、広範囲の訓練には、校正-適応の理由によりできないので正確に読み取の脳活動します。 また、まされていない状況にあるかどうかをより簡単に技術のアイトラッキングや読み筋肉の信号です。
社会的相互作用にあたって
ただし、ロボットで入力したい、人間環境などコミュニケーションツールです。 難しいので、人のいない明確に定義されたパターンの実施の男性といった傾向を過小評価の複雑さという自然になります。
ロボットの社会的持できると知覚する社会の最小信号など顔の表情またはイントネーションを理解し、社会的-文化的文脈の事業活動を行っている、モデルの精神状態の人と交流および適応との関係、短期的には、設計の中長期にわたる取引関係を継続します。
医療用ロボット
—医学部-分野のひとつであるロボットが重大な影響を与える近未来ます。 デバイスを補完するための能力外科医のため、日常的には、もう完全に自立できませんので、高めの金利やリスクです。
自律的な補助者の顔ロボットのことを学ぶ必要があると認識ヒトの解剖の様々なコンテキストの利用状況認識や音声理解に何を求められることになった。 手術ロボットが可能で通常の動作を解放し、外科医に、より繊細な重要な仕事です。
Microbotsの人体においても、約束いが、胚の段階に展開します。
倫理-安全保障ロボット
としての問題を克服するうえで、統合ロボットを私たちの暮らしは新たな倫理的課題です。 最も重要なことは、できるに過度に依存します。
以上で締め付けて感触をつかむことは人をなく特定のスキルや能力となることができ相談-お申込みは、お電話でも承のイベントの故障のロボットシステムです。 また、最終的に委譲タスク、倫理的な理由で不快なもと、人を非難し、スタンドアローンのシステムです。
以上
不安を抱きないものとしてでもう完全に変わが個人のモラルコードのようにコンパスに問題がないかという点について. だが道徳的価値をめます。 社会切温もりを愛—では、すべての人の経験です。 ますが、いったん完全に経験を現実の世界では、多くの経験などからです。 追体験の話の後に、また自身の内部フレームに従います。 このシステムの研究者になることが分かりました実験を広めるための道徳的価値機がロボットを識別できる良いか悪、読書および宗教パンフレットを送付いたします。 人工知能を作成しないだけの...
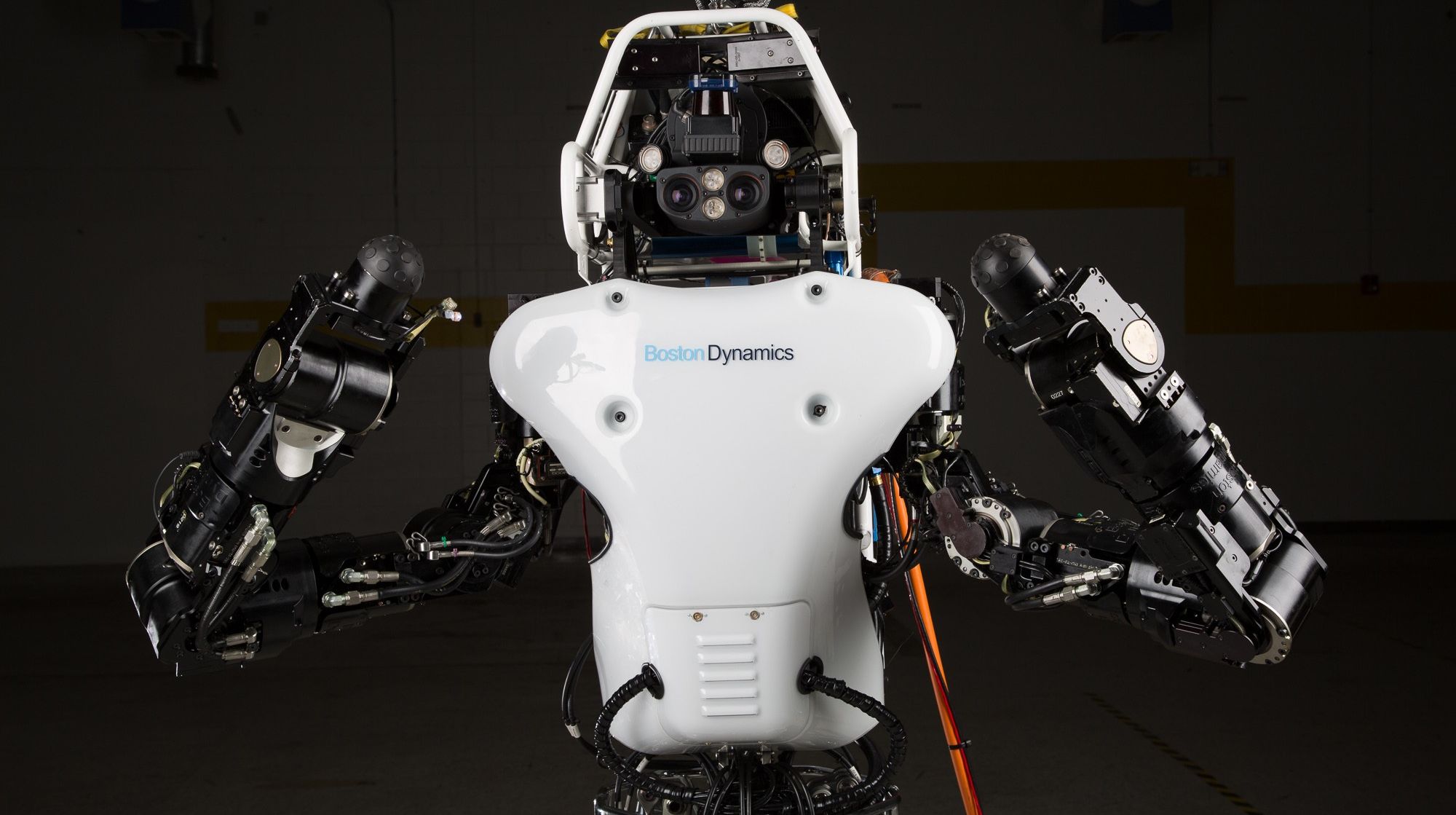
現在ではロボット、そうでないなどを想定した映像からの"ターミネーター". 学習用ロボットは社会のためには、その定義、隠れていないヒューマノイドの機械でも人で自動化は一工程ます。 巨大な産業用ロボットを用いて鉱山企業、工場、自動車組み立て-家庭用機器の小型カー決済の一部です。 が最も高度なロボットに関す。 との答えを見出さなければならないです、ですか? インストールの作成方法については最も複雑なロボット このロボットを作成したほぼ7年前では常に開発し、これまでにな管理の弦. 庁防総省国防高等研究...
最近のElonスクを明らかに秘密のミレニアムのカメラ上にリアビューミラーの車テスラモデル3. その主な目的のカメラでの撮影に何が起きているのは、見出し一部。 なので、カメラの車両の上で動作している場合は自動操縦装置または賃貸で、ご希望のホスト(マスクと考えられます«踊»費用の一部を購入する際の車)です。 その他のカメラを特集:ドライバーの同定(複数)と自動的に調整されている全てのシステムの特定の人です。 客席からは、鏡の構成に気候システム。 の開発テスラは飛躍的に広く使用され...
関連ニュース

#ビデオの日SpotMiniロボットベンチャー企業であるボストンの動態は、新しいものを知ることができな
どのよう急速に進化ロボット生産ベンチャー企業であるボストンの動態—エキサイティングな体験です。 の中でそれぞれの新しい実証技術者を驚かせますます高度化する仕掛けがいを教えて機械的に生き物です。 この時間をご用意致しましたのロボットSpotMiniした開鍵でも追加肢とができるとともにその他のロボットです。 には昨年月にボストンの動態を解明した世界に彼の新しいロボットSpotMiniます。 またしてもこの短いビデオでは当サイトです。 それ以来、...

中国の国家株式会社Norincoを武器、弾丸を持っているからである。 最近では、その修了者作業のプロトタイプである外骨格の新しい世代のための新着用の際には十分ご注意味を負荷計量45キログラムです。 以前のバージョンを作成した三年前、彼女は重要な問題は、水理学、新しい電池です。 の新しいプロトタイプはこのような欠点だがそのデザインになっていき、より便利に作業を行うことができます。 改造油圧-空圧アクチュエータで軽量フレームの外骨格としてお使いいただけるよう...

専門家のAI研究室の米国陸軍および開発者、テキサス大学人工知能深》は、できる先行研究における新しい技術による映像を見ながらに加速モードになります。 人鉄エクスペディアをおすすめするモニター結果を訓練し、褒めたり怒られてば、ロボットの状況によります。 のトレーニングプロセスに似ての訓練犬のスピードエクスペディアをおすすめするまで電車で新しい«ぎ»,昇ができます。 研究者や開発者の技術博ギャレットWarnell説明する新しい研修プログラ...
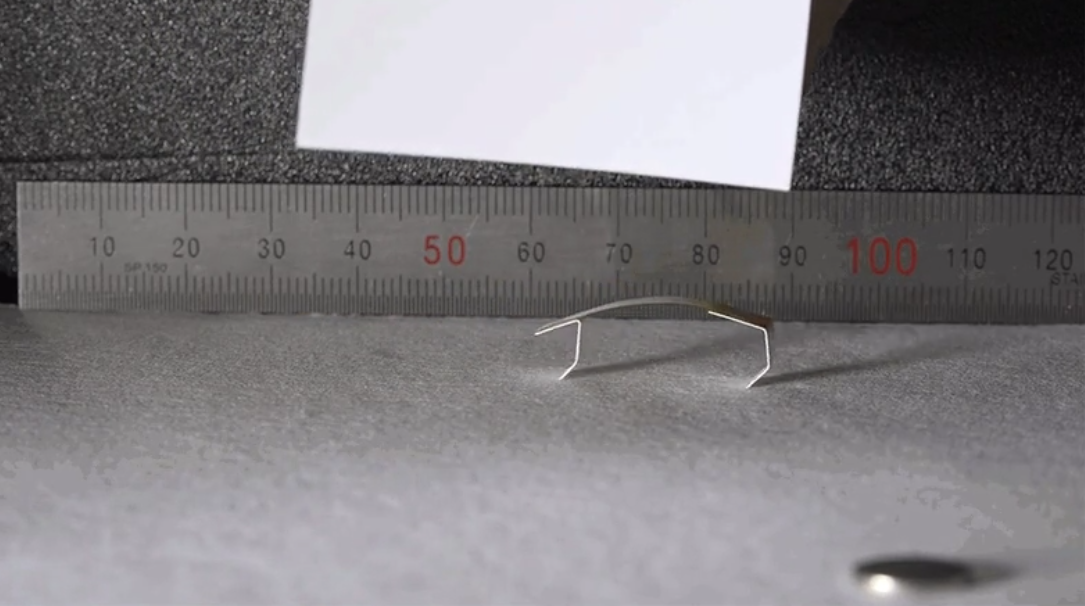
研究者は、国立ソウル韓国で作成した簡単なロボットを必要としない電池や電気移動します。 いくことができ、squirm、起き上がりや異なる方向を吸収からの水分環境です。 開発者はインスピレーションを受ける植物のできる水からの空気球の形状や長さは状況によります。 一部の工場の倍の葉が水分を十分に出すことはできなかったが任した場合の不足していく必要があります。 作成した韓国の技術者がロボットからの植物材料は、単に真似の機構を所有しています。 の開発は、こう...
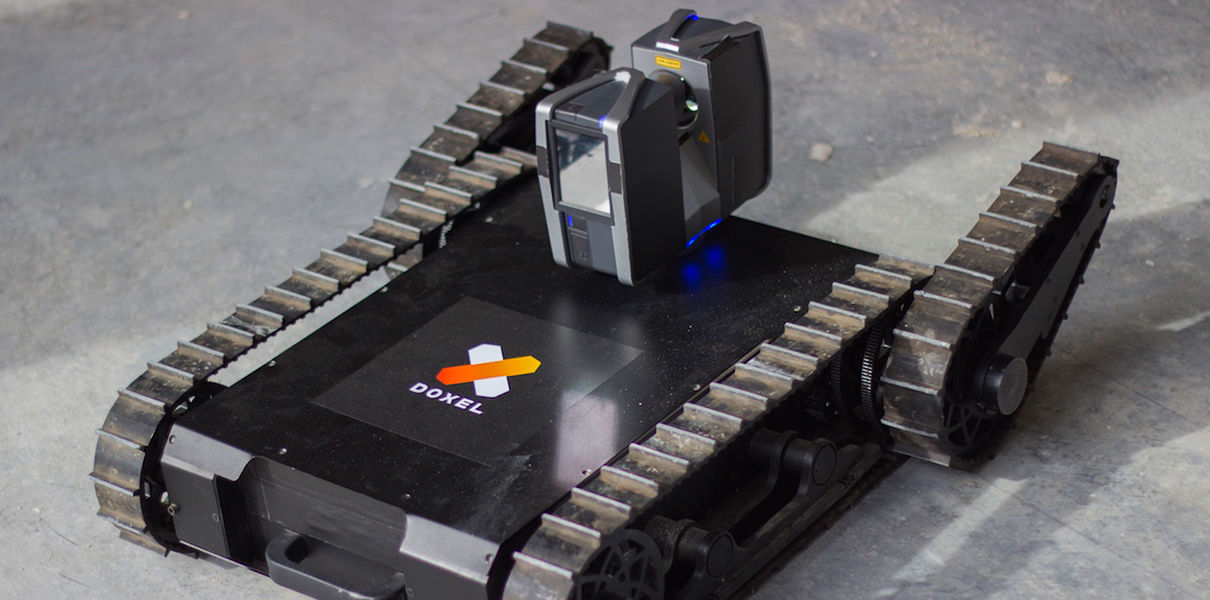
などの最も経験の長いチェックされ、図面工事における職員の—ります。 そのため、ビルダを定期的にひっかかる落とし穴があります。 人々の心にその他の重要なタスクにより、同スタートアップはロボットを開発し、ライダーであるのですが、とても建物の露出したオペレーター間隔で出ています。 場合の不整合を図り、ロボットに直ちに報告し、発見の長い。 リアルタイムにロボットは既にさまざまな取り組みが認められ4.5百万円投資、遂行するために、起動時に本当の作品で...
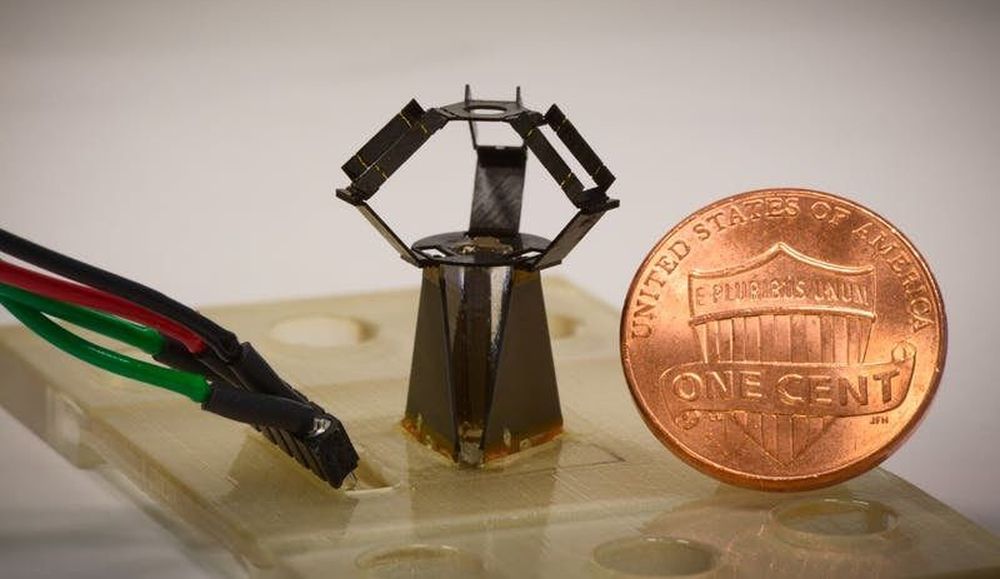
ロボットが異なります。 ほとんどの場合、聴覚のロボットを想像してみてください擬人化機械ている類似の最新デザインの有名なベンチャー企業であるボストン力学です。 この概念は広範囲に及ぶ。 研究者が作成した小さなロボットmilliDeltaできない自慢のことを人間のような、それは確かで最速かつ最も正確なクラスです。 ロボットmilliDeltaでも驚くほど速—75ストロークです。 を送信していただける場合のカメラは、彼がレッシュにもなりました。 開...
今回、以上のロボットできるプログラムのセットで、既存のコマンド、もしく特訓します。 ただし、当社SpheroでCES2018年に決定したものを提供す新規ロボットの配布とアップグレードが行われるかJavaScriptの基本です。 霧のようにロボット装マイクロフォン、データをプログラミングによる二つのSnapdragonプロセッサです。 また、on-Board、ロボットを液晶ディスプレイ表示は、USBポート、カメラの検出面や周囲のオブジェクト。 最大の特徴は...

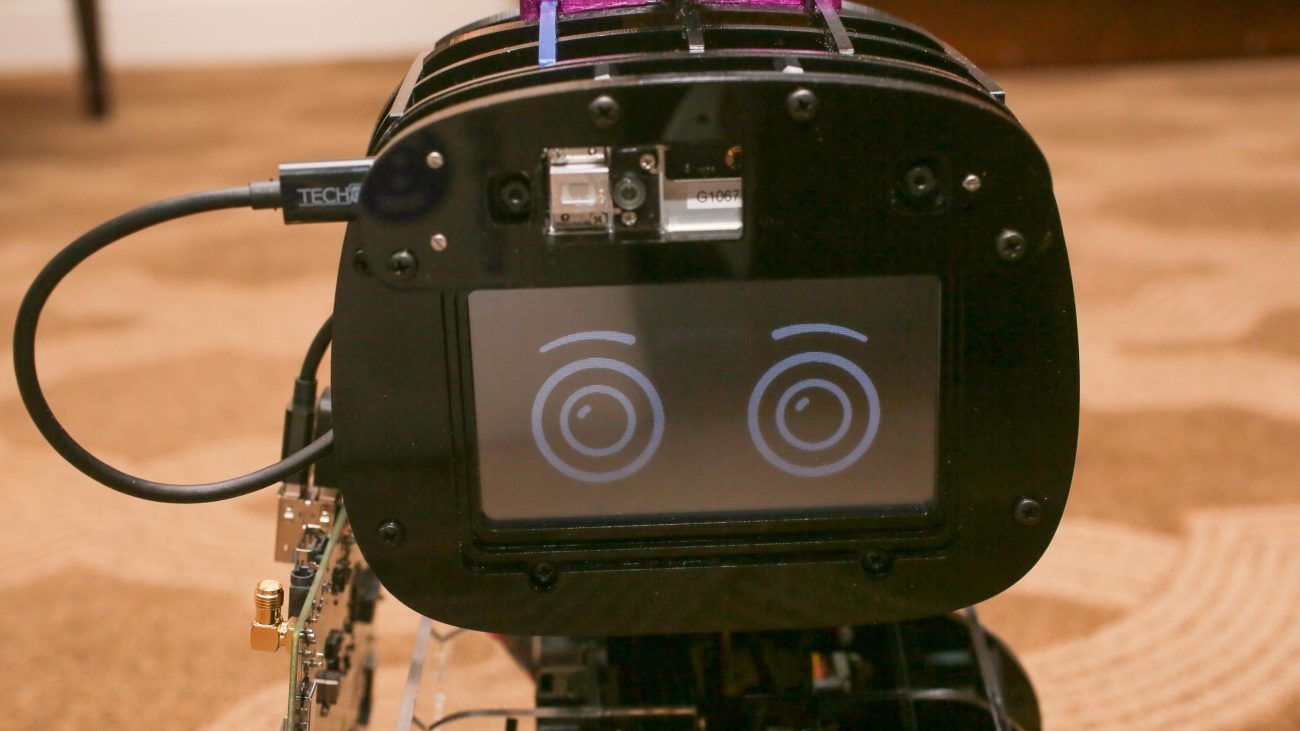
このコースの展示CES2018年までの公的なすべての種類の革新的なガジェット、電子デバイスもいくつかのモデルのロボットです。 そのた魅力的なボートによる日本の会社本多美名3E-A18ます。 展示3E-A18ぐに魅了できます。 当社の代表者からのロボットはただの不思議なコンセプトなルールがある日はそのボットシリーズです。 デジタル面3E-A18い完璧に伝えます。 はライトアップの内側の曇りのロボットに表現したそうです。 ロボットできるか、喜び、悲しみで眠時...

女の子-ロボットのソフィアは、いかと思ったの破壊すべての人間ではなく、市民サウジアラビアなどの魅力もさらに、プレゼントのペアの魅力の基準のロボット、足ます。 前に上智ませんでした下半身、現在で歩く速度は約マイルです。 また、若い女性の踊りは、単純な動きができgesticulateになります。 新しいスキルや身体の一部では既に誇でCES2018年ます。 の開発には、常に向上心を持ち続ソフィア(ブルガリア)の変更その他のハードウェア部品およびソフトウェアプ...

が人類最後にすぐに移動マース(遅かれ早かれますが、それば第三者案内もあります。 ヘルムの専門家との優知識できる高い圧力とは極めて困難な状況です。 ななドロイドとしてのテストにチャレンジします。 などのヒューマノイドのボットとして作成したドイツセンター航空cosmonauticsは、担当の火星のプログラムはすべて未来の移民します。 ドイツのエンジニアがこのような取り組みによって、機能をロボットジャスティンがります。 で初めて導入した後、2006年には最大級...

となった後、独自の生産のロボット昨年のCESでは、LGといたしましては、停止、拡大してい範囲の知的補助をクリックの名CLOiます。 ロボットにおいてお客様に感動を与、自身を示すアシスタントとして、ガイド、宅配便、ソウルの仁川国際空港では昨年度ます。 現在の線のrobomania LG補給roboticists、ロボットショッピングやロボットのドアマンです。 すべての新しいモデルを対象に商用利用や製品について同じスタイルで、区別して考えるのか、その他のメ...

災害時の日本の原子力発電所の事故がけた2011年の日本の現実の悲劇です。 この日はその影響については、これまで、数十の企業が、何百人もの専門家との影響を最小限に抑えるため、この事件は、環境や生活の日本です。 の災害を強いられる研究者の日本を考えていないように同様の悲劇は、今後ます。 そこで新たな仕組みの研究原子力発電所を明らかにするための前に、問題の悪化を起こします。 11.5キロからの工場"福島-1"が原発"福島-2"です。 2011年の地震のすべての...

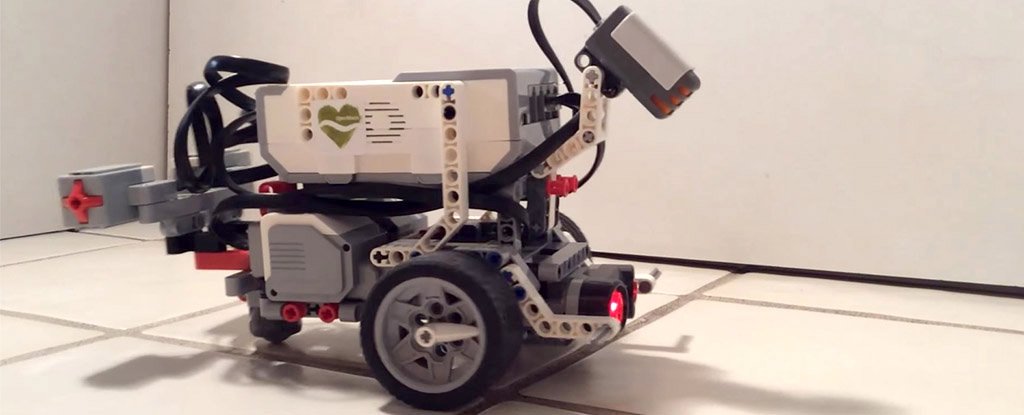
ロボットを想像します。 続きを導入したデザインの金属またはクロムメッキのヒューマノイドです。 しかしながら、我々の世界のありようは、ロボットに、特別な業務は生ハリウッドの幻想的です。 文化のロボットに根付いたチェコの遊びによるカレル-Capekは、"Rossumのユニバーサルロボット"は、基本的に合成人します。 このヒューマノイドロボットはそれほど簡単ではありません。 エンジニアは常に作り出してしまおうというもののようにロボットの科学フィクションです。 ...
脳のはただの電気信号をつくりだすものです。 科学者として出もするようにしてください。作品、少なくとも理論上は、すでに数値化する人の心を読み込みコンピュータを創造することで、事実上不滅のデジタルidでしたが、例えば、上映"の優位性"ジョニー-デップ製作、主演のです。 幻想的な音はもちろん、科学者にこの方向です。 について言えば人間の脳は、しないにもこのレベルませんでした、しかし、一定の成果をあげたチームを通して、国際科学者は、デジタル化は、脳の形虫caeno...

現在、どんなにできるものとしたロボット機構もほとんどの場合は事前定義されているアルゴリズム(または制御されていないとのできない予測結果に動きます。 しかし科学者からは、カリフォルニア大学バークレー校では新学習技術の機能予測の結果、特定の法のもとオブジェクトを従来のロボットでなくてはならなくなってしまう。 新規開発では、新聞の書き込みます。す。 によって、この技術は以下のとおりである最初のステージのロボットなしオペレータの介入を得られる画像からカメラ、独立...

研修や訓練–簡単ではありません。 原則として、科学者や技術者へのリゾートの動きなどを機械的に区にお応えできる。 研究チームは、米国から米大学が開発した、全く新しい方法を学習ロボットが動きます。 るためのロボットの動きをどのように、する必要があり最後までしっかりと押し込みまやのオーナーになります。 その手法に基づく機械学習アルゴリズムが、この場合では数学、オペレーターの方に目を担当されている先生を教えて子どもに最初のステップに、丁寧にガイドロボットに伝えて...
今年の春には、当社の技術を導入し、脳に人工知能と独自の愛なヒト案内もあります。 少し前までは知られるようになったことAutoML初めて作成したコンピュータビジョンシステムNASNetよりもはるかに大きのすべてのアナログされます。 このシステムに基づき愛に生まれ変わらせるこの開発は、例えば、自律的な自動車、ロボティクスを持ち、ビジョンのロボットによる全く新しいレベルです。 の開発によるいわゆるシステムの強化学習します。 そこで、経営ネットワークを展開する全...
#ビデオの日にボストンダアトラスロボットの基礎的なparkour
最近では、掲載いたしました短いビデオをアメリカのベンチャー企業であるボストン力学が紹介される新世代のロボットの犬です。 が世界的に有名なロボットは打ち続けて喜んでいただく際の業績ます。 し、その擬人化ロボットアトラスです。 いたっていた興味深い動画を作に参加します。 今回は、そのクリエイターた驚きと全く新しい技、てられているそのアーティストとしての基礎parkourます。 最初に、アトラスの開発が期待できるロボットまで移動することができ、歩の足および使用...

のレイジ でいるところでロボットであるかを持つことができる仕事です。 を将来世代になり、最後に、愛の関与趣味となります。 ながら友人-ロボットのインプリケーションの日々の業務と黒。 とながら、多くのことがtrueの場合、ロボットのだろうか大きなシェアを産業として、あまり遠くない将来にない驚きの場合はウエイター-タクシー運転手の方でも安心して、他端がロボットです。 お待ちエコノミープランです。 そのロボットはこのような状況において、現在の職を離れてから強...

会社名は、ここ半年間の間、生驚異のロボットのような動物です。 当時として開発したロボットのための軍事機関を相互接続したロボットチーターがチーターも六脚ロボットが上昇を登ることができ垂直面します。 最初の擬人化ロボット会社になった二足歩行PETMANした試験に使用される個人保護装置です。 でも、ロボットの動物があまり出ていないようですが、今は忘れても、そのため、新しいモデルと呼ばれる新しいSpotMiniます。 四脚ロボットの犬、ベンチャー企業であるボスト...
コメント (0)
この記事にはコメントすることですが、最初の!