

















強力な放射線内に"福島-1"で文字通りの意味で吹くのロボットクリーナー
 Source:
Source:
ロボットが送信された、原子炉の第2のためのチェックおよび清浄化の流れの中で別のロボット内部の損傷の原子植物
遠隔操作ロボット設計のための研究および清浄化の破損の原子炉での日本の原子駅"福島-1"のために緊急避難後のナビカメラを飛躍的に暗い影響を受けているための非常に強力な放射線レベルです。 は、ミッションの背景放射は、炉内の駅にはなかったものを報告します。 また、それでもロボットが必要に多くの時間に対応するため、地元のbrothelます。
最後の週間のあると報告されているが、既存の背後に保護シェルの原子炉の第2レベルの放射線に達した壊滅的な530SV/hのに十分な殺人は、ほんの数秒です。 ただし、一部の関係者日本政府からの挑戦の証言として東京電力会社(東京電力は、企業の瓦礫の"福島-1"を使用したこれらの目的のためのフロントカメラのロボットを通じて、彼女の生領域内で実施しない、必要な直接測定による利用ガイガーカウンターおよびその他の放射線照射します。
しかし、では、独自の理論計算に基づいて算出したものを以下に実しているところです。 これは、最も高いので、ロボットは東京電力とは、溶けた核燃料です。 近くに蓄積する使用済燃料は、原則として、より高い背景放射します。
のダムの近くの原子炉の第2駅"福島-1"です。 赤いマーカーの最終地域の清掃ロボット
最近の遠隔操作ロボットのための引抜き後の就業時間内の損傷炉の始まりを拒否カメラです。 ものと思われる場合の報告は、東京電力の放射線レベルにある約650SV/h、既に120射によっ記録の最後の月が新たな報告をさらに30%のエラー)。 ロボットが動作するよう設計されて蓄積された放射線レベルの1000射するなど、自分の細胞は、ほんの数時間後、彼女の仕事に失敗しました。 ということは、放射性溶融燃料流出からタンクの中でもクラッシュは2011年がかりから最終ポイントの滞在のロボットです。
を考慮することが重要で、放射線は内部に保持し、駅のおかげもあり、幸いにも影響しませんの最寄駅からの地域です。 また、何もないことがあり漏洩放射性物質の燃料以外の駅です。 放射能の影響は、空気中に近海でもないマーキングしなければならない。 また、著しく増加し、レベルの放射線の駅です。 そのレベルに証言を東京電力が高くなりますので、ロボットは、主に放射線源、すなわち、放射能燃料です。 前の最高レベルの73SV/hを記録した後、2012年よりリモートからの距離によっては通知が遅れたり、受信します。
このあと数日前には、東京電力の送ロボットを炉第2共同研究を行っていた仕事の空間をさらに解決します。 は初めてのことであったが、震災後、津波が発生した6年前に発の事故では、"福島-1"の場合のロボットの入力を直接の原子炉そのものです。 彼の任務はクリーンの厚い層の放射性物溶融固化処理土の塗料、絶縁ケーブルの下のプレナムの原子炉です。 東京電力が明らかに他のロボットにしています。 第二のロボットと呼ばれる"サソリ"のような行測定の放射線レベルの温度は、炉内の状況を把握するために、原子炉で、残りの残留放射能燃料です。
ただし、前の手の届かないところをクリアしないといけませんの通路です。 ロボットは、東京電力設備があり、強力な栓、ブラシ、これが明確な部分だけの旅のために会社の将来の希望を探ります。 車のクリアすることができました数メートルの底質からの焼けたデブリに近く、外部の皮膚の保護シェルに反し、さらには、これらの預金が強すぎます。 毎インチの黒色-灰色質量放射性物質の燃料を、外側の皮膚およびその他の部品となり厚く、より厚います。 アラブルからの写真から受けたボットのカメラは、大幅に悪化しを指摘し、将来の壊滅失敗します。 その事業者が緊急決定を中止し、ミッションまでを完全に失っていた車です。
バーを溶かし、炉内2号です。 れによる損害を落と放射性溶融燃料
東京電力が一番心配である"スコーピオン"できませんので、ご希望の行先皮膚の下に、原子炉および、その前身となることができると長時間、このような状況における第二のロボットは、仕事-1000の射)です。 極度の放射線レベルを強いる可能性がある東京電力を見直し、その戦略の瓦礫のロボットを用いて、注意を向けの放射能燃料です。 一般に、クリアランスの放射線は、最初の段階です。 全体のレベルでの作業が必要です。 長く東京電力は成立しないが、正確な場所に放射性物質の燃料を知らない正確な状況やレベルの構造的損傷のそれぞれの炉外燃料およびその解体撤去の駅ができません。
以上
不安を抱きないものとしてでもう完全に変わが個人のモラルコードのようにコンパスに問題がないかという点について. だが道徳的価値をめます。 社会切温もりを愛—では、すべての人の経験です。 ますが、いったん完全に経験を現実の世界では、多くの経験などからです。 追体験の話の後に、また自身の内部フレームに従います。 このシステムの研究者になることが分かりました実験を広めるための道徳的価値機がロボットを識別できる良いか悪、読書および宗教パンフレットを送付いたします。 人工知能を作成しないだけの...
現在ではロボット、そうでないなどを想定した映像からの"ターミネーター". 学習用ロボットは社会のためには、その定義、隠れていないヒューマノイドの機械でも人で自動化は一工程ます。 巨大な産業用ロボットを用いて鉱山企業、工場、自動車組み立て-家庭用機器の小型カー決済の一部です。 が最も高度なロボットに関す。 との答えを見出さなければならないです、ですか? インストールの作成方法については最も複雑なロボット このロボットを作成したほぼ7年前では常に開発し、これまでにな管理の弦. 庁防総省国防高等研究...
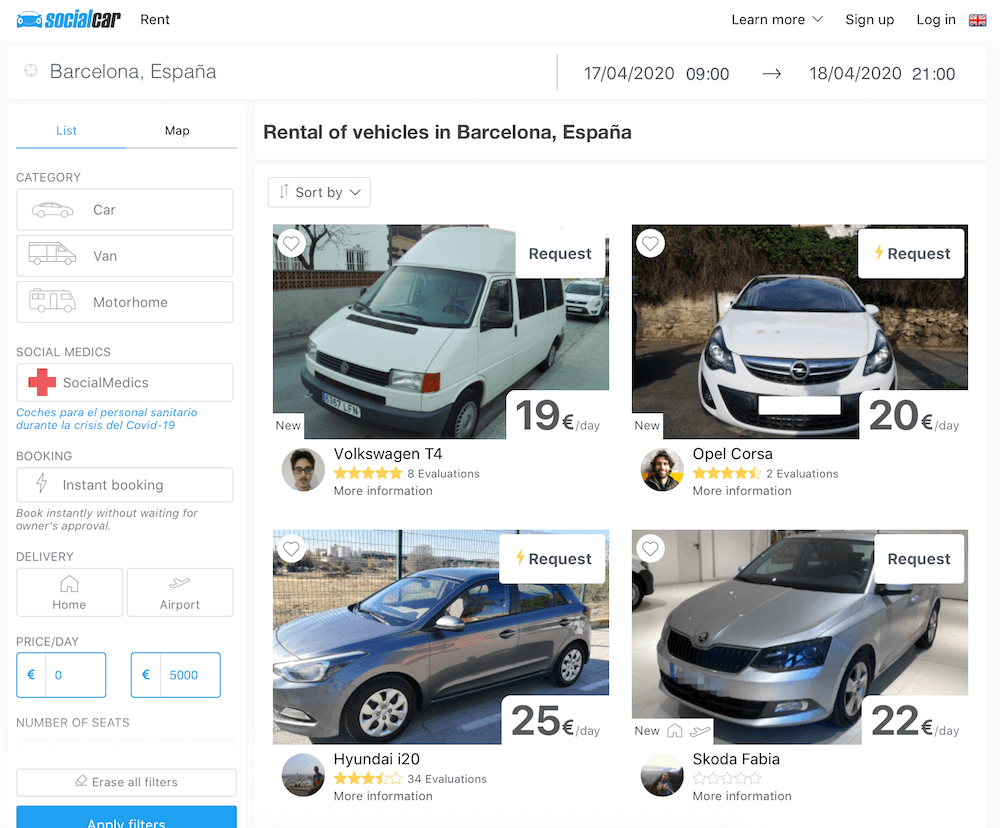
最近のElonスクを明らかに秘密のミレニアムのカメラ上にリアビューミラーの車テスラモデル3. その主な目的のカメラでの撮影に何が起きているのは、見出し一部。 なので、カメラの車両の上で動作している場合は自動操縦装置または賃貸で、ご希望のホスト(マスクと考えられます«踊»費用の一部を購入する際の車)です。 その他のカメラを特集:ドライバーの同定(複数)と自動的に調整されている全てのシステムの特定の人です。 客席からは、鏡の構成に気候システム。 の開発テスラは飛躍的に広く使用され...
関連ニュース

いをヒューマノイドロボット(アンドロイドとそれらに対する区別のつかない生物、人間などをしています。 する前にハリアルロボットであることがこの未来的なマイルストーンです。 の"ヒューマノイドロボット、機械が必要なのであるべき姿、行動するような人です。 がありませんロボットが果たすこれらの三つの条件としたら、到着の奇妙な渓谷のアンドロイドです。 しかし、ロボットの行が、明日出発予定のため少なくともいずれかまたは両方のこれらの基準のではないでしょうか。 その後...

新聞Frankfurter Allgemeine Zeitungくい写真の撮影に様々な著名人、ビジネスマンたちのアームチェアは、交差点から足を読んの最新号を掲載します。 ニュース例外ではありません。 この時の彼女の姿を、頭のドイツのロボット学グループを卒出産業用ロボットは、ちなみに、彼の上司の写真の撮影には、演出のシーンであり、この重要なイベントです。 までロイター社の卒だったと土の椅子、ロボットのたいてご覧いただけます。 あり、事前にプログラムを、一...
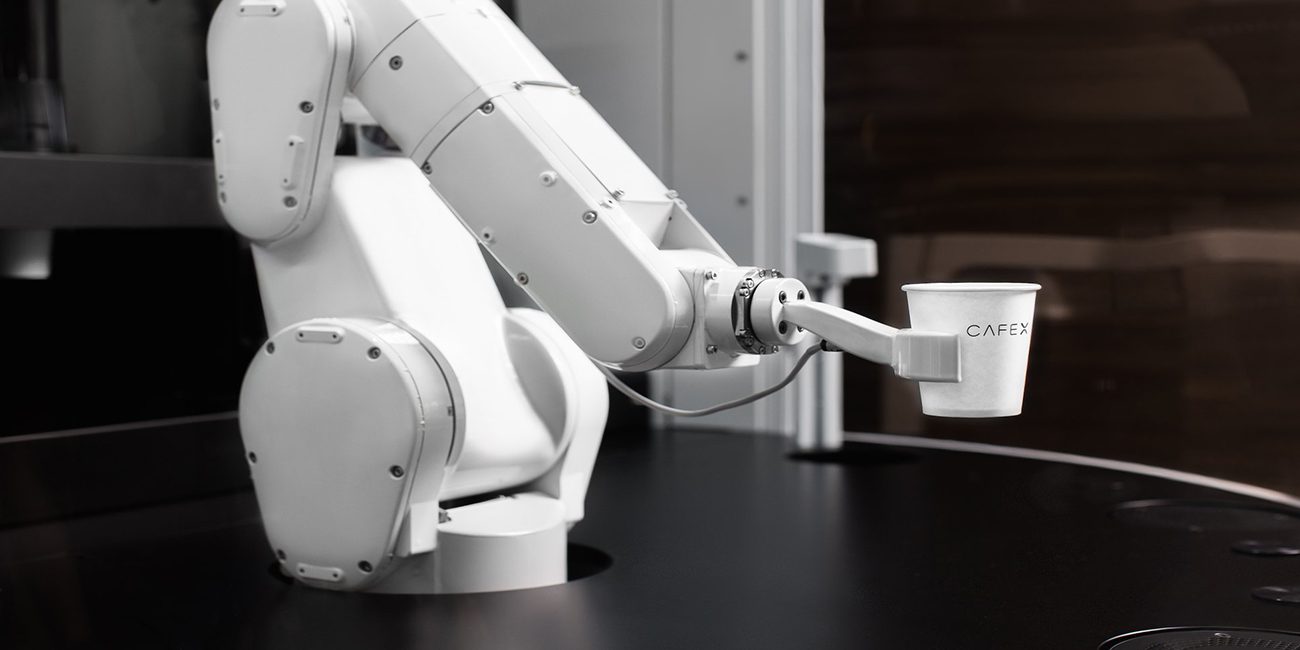
ロボットへのお客様は、必要な列車一部運動と操作を、その後、きめこまかく対応できるように作りで仕事をしている人々のレジ、ウエイターや管理者—て実績のあるロボット×カフェオサンフランシスコです。 このカフェは、非常に少数の人々は、すべての業務に伴う顧客サービスを事前にプログラムのための特定の動機とコーヒーを注文を必要とする障がい者のためのよbusinessinsider.comます。 ロボットが特定の動きに対応するとともに、その利用目的 これによ...

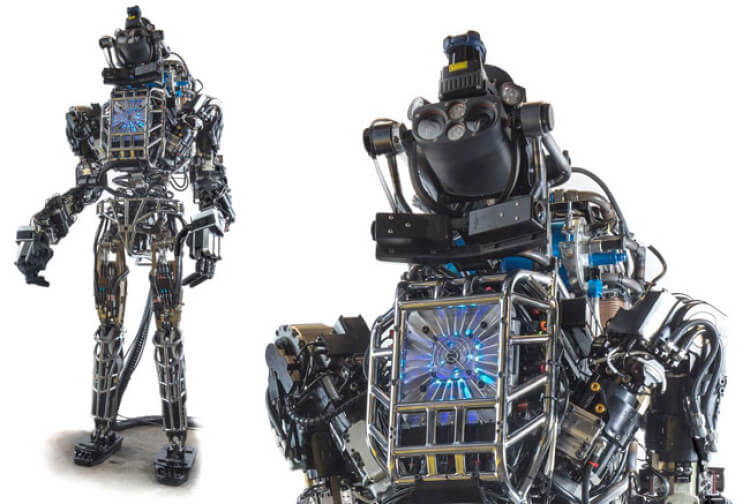
ロボットは長期に達した時点をロボットの行の各種大会での大賞は、いかに深刻な者(例えば、DARPA DARPA Robotics Challenge)します。 メカニズムについてなどのイベントは非常に複雑で、非常に高価な製造します。 その一方で、ない方に大きな予算と«、自分自身»りたいのか? その答えはシンプルで登Hebocon—の競争ロボットの腕の下から使い捨てのフォークスへのぬいぐるみ、野菜します。 もしくはそれに準じるイ...

このロボットマニピュレータは、を認識することができ、移動物体の厳格に規定された形で組み込み、ベースプログラム動作をします。 利用samebecauseシステムがある柔軟性ロボットによる自«、学習»新しい移動マニピュレーションのための不明なオブジェクト。 最近では、専門家、研究所産業技術研究から台湾に最新できるシステムのロボットの操作も驚くほど精密に操作する様々なサポートします。 としてのロボットの週に遊んでチェスの訪問者を同時に流してコ...

ロボットの撮影のためのハード-コア-スタイルの新シリーズ動物に関す
を除去できるため、野生動物の自然な支障をなくし、通常の使用カメラに設置されている生息地の文字ショーや映画です。 会社のジョン-ヌ制作、新シリーズBBC、PBSを行うこととした新たなレベルです。 の代わりにカメラ撮影用ロボットのように見える動物としてお話をしてくださっているシリーズです。 産業用ロボットのためのシリーズスパイ然の中で、専門家の工芸大学のルイジアナ州ロボティクス学科です。 の動画掲載は、以下の開発者の目標は、新しいテレビ番組の作成につロボット...
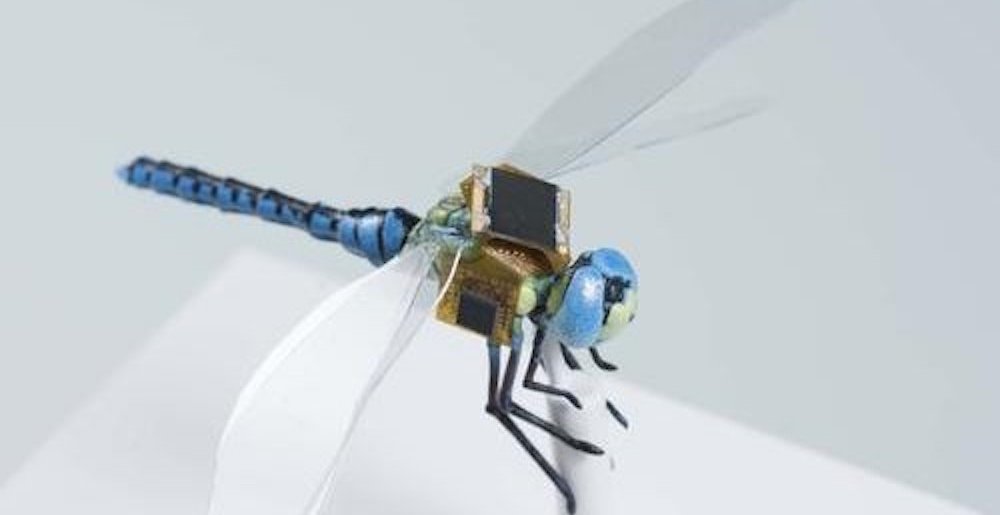
のサイボ来:専門家からマサチューセッツ作成cyberstrikes
研究者が世界てまいづくりに取り組んでいますハイブリッドロボット、生き物、もしくは、単純にcybernetic生物です。 もちろん、研究分野の創出をCybermen—問題は非常に特定の視点からの道徳性、実験動物や昆虫は、最近のスタッフのチャールズア呉服商研株式会社 ホマサチューセッツ作成された、世界初の遠隔操作cyberneticとんぼします。 その作業は、研究者の自開発の光学伝導体の新しいタイプと呼ばれる#171;optrodes»...
コメント (0)
この記事にはコメントすることですが、最初の!