

















从酷手术前十个最新成就的机器人
 Source:
Source:
<机器人革命可能不会来了,但是我们的机械的兄弟取得了相当的成功。 和现在的一些主要专家在这一领域提出一个短名单的十个最令人兴奋的最近的事态发展。 在该列表的一些最令人印象深刻,原始、研究、创新和商业产品,我们看到2018年,以及一对夫妇的2017年,这肯定是值得看一看。
<<跨id="更308492">
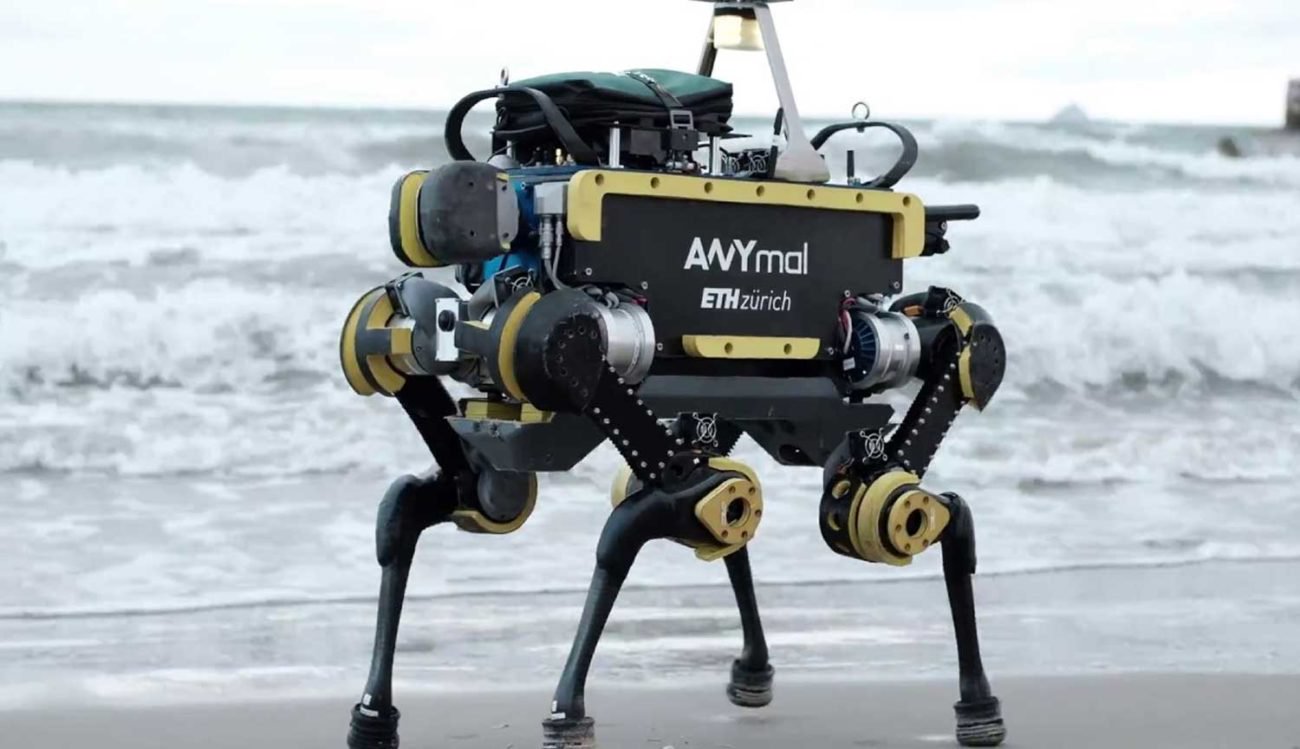
机器人,Atlas从波士顿动力
<看来,没有几个月没有,波士顿动力重写指南上可以做什么和不能做的机器人。 去年,该公司有超越了自己,使Atlas系统的机器人做跑,跳过木和间跳跃的木箱。 <<面src="https://www.youtube.com/embed/LikxFZZO2sk"width="650"height="322"架边界="0"allowfullscreen="allowfullscreen"> <创作者的Atlas系统承认,该视频,我们看到已精心挑选的若干尝试,其中许多是不是很成功。 然而,他们说他们想到激励,不要准确地反映今天的成就。 嗯,我很抱歉他们。直观手术达芬奇SP平台
<机器人手术的区域是不是新的,但该技术是提高迅速。 市场领导者的手术机器人,达*芬奇的直觉的机器人是第一个批准的美国食品和药物管理局在2000年,但自那时以来已走过了漫长的道路,现在该公司生产的三个单独的系统。 <最新的系统是一个单一端口达芬奇SP,是能够引进三个文书纳入本身通过2.5厘米的套管(管),给出了一个全新的意义在微创手术。 去年,该系统收到的美国食品药品管理局批准开展泌尿科的程序,现在公司已经开始提供一个新的系统的客户。软机器人动过程中的增长
<机器人长期借用的原则,从动物世界,但新设计一个机器人模仿的运动植物的卷须和真菌生长过程,打开了眼睛的导航机器人。 <<面src="https://www.youtube.com/embed/oRjFFgAZQnk"width="650"height="322"架边界="0"allowfullscreen="allowfullscreen">这里的一个理想的例子viewdocsonline设计;研究人员不仅仅是复制性质,它们已经采取的一般原则和扩大它。 管机器人变成在前与气压力,但是,不同的植物,可以成长的步伐的动物导航使用视觉的反馈,从摄像机。
3D-印液晶弹性的软的机器人
<软机器人是增长最快的一个学科领域,但这些设备中没有硬电机或泵不断成为问题。 作为一个潜在的人工肌肉已经提出的各种形改变材料,包括液晶弹性体造成的机制。 <哈佛大学的工程师已经证明,这些材料可以打印一个3D打印机使用一种特殊油墨,使开发者可以很容易地程序的所有种类型的特别能力改变形状。 此外,他们的方法产生器,能显着提升更多的重量比前的做法。人为的肌肉:samoklejushchiesja、液压强化的驱动
<在试图找到一种方法带来的功的软机器人,去年科学家从科罗拉多大学已经开发了一系列极其廉价的人工肌肉,可升降的200倍于其自身的重量,甚至治愈自己。 <这些设备基础上的麻袋充满液体,这会导致他们的合同的力量和速度在骨骼肌在应用的电压。 最有前途的应用程序的机器人是所谓皮亚诺-哈塞尔,这是几个矩形包连串联,这可能是压缩线为现实的肌肉。自组装纳米级机器人从DNA
<如果你曾经认为有关机器人,为巨大的金属机,大量的科学家的工作创造纳米级机器人的DNA。 去年,德国科学家创建了第一个机械臂与远程控制从DNA。 <<面src="https://www.youtube.com/embed/K9fuSVaszyg"width="650"height="322"架边界="0"allowfullscreen="allowfullscreen"> <他们已经创建了一段密切相关的DNA分子,将其作为一个机械手,并附上它的基DNA通过一个灵活的联合。 因为DNA携带有电荷,他们管理的力量的操纵旋箭头像小时,馈电电压和改变方向,通过改变这个电压。 我们希望,这方面最终可以使用的材料在件在纳米.有翅膀的机器人DelFly
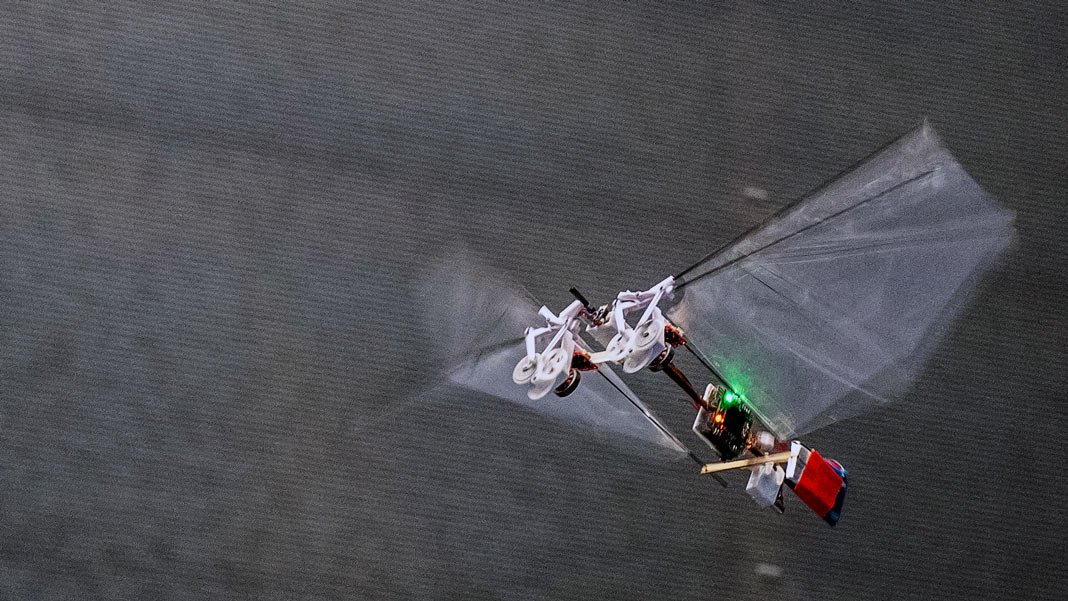
<机器人技术不仅借鉴了从生物学、及时的债务。 和新机器人带翅膀的,由荷兰工程师,模仿卑微的水果飞翔,已经做到精确,显示动物如何执行他们的演习,逃避掠食动物 <<面src="https://www.youtube.com/embed/CEhu-FePBC0"width="650"height="322"架边界="0"allowfullscreen="allowfullscreen"> <这个实验室是由挥动机器人多年,但这时她拒绝从飞机的尾部,这是用于管理以前的化身。 相反,他们使用的对翅膀,如昆虫、浮动,滚过并落的灵活性的果蝇。 这提供了一个有益的平台,研究动态的虫航班,以及为更有用的应用程序。软机器人外骨骼
<外骨骼必须防止的伤害,在工作场所,帮助人民恢复行走的能力,并甚至增加后劲的士兵。 使用庞大的军服,然而,似乎并不是理想的,因此,研究人员从哈佛大学的工作在柔软的外骨骼结合而专门设计的面料的,轻型传感器和执行机构。 <<面src="https://www.youtube.com/embed/eeplAvCr5zM"width="650"height="322"架边界="0"allowfullscreen="allowfullscreen"> <以及去年的球队进行的一项重大突破,结合他们的新的外骨骼的有机学习算法自动配置的设备按照特定风格的走的用户。 利用生理数据,它可以调整的时间和地点装置有刺激的自然用户运动以提高效率的步行路程。e-系列Cobots从普遍的机器人
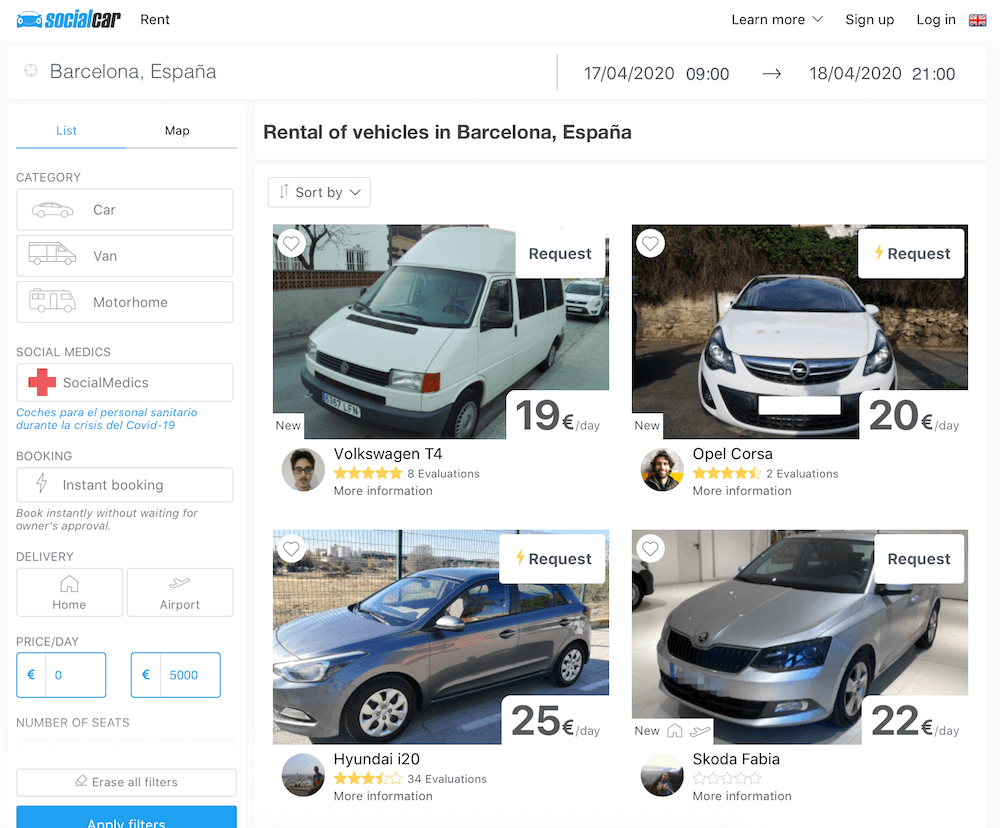
<的机器人工厂是不是新的。 一个巨大的机械操纵器,你看到在汽车制造厂,通常保持在笼子里,不小心伤害的人。 在最近几年出现了越来越大的兴趣在所谓的"lobotamy",合作(辅助)的机器人,设计工作,肩人民和甚至学习。 <在今年年初,我们已经看到的下降,重新思考机器人技术领域的先驱,这种做法。 但是简单的一个手设备制造的丹麦公司通用机器人技术已成为普遍的讲习班和仓库周围的世界,占大约一半的全球销售chobotov的。 去年他们发布了其最新行的e-系列与增强的安全功能和意义上的力和扭矩。爱博尼
<后近20年的沉寂,机器人的狗爱宝是一回,这一时间非常有趣的更新。 除了改善外,新的机器人宠物使用的优点的人工智能,更好地理解环境和团队,并开发了一个独特的性格基础上的互动与其所有者。 <一个新的谅解的背景下–这是什么特点的演变的社会机器人,其中许多希望将能够帮助其子女的教育或提供支持的老年人。 <为新机器人邀请你。建议
焦虑时,不是所有的作品,因为它应该,而是一个完全彻底改变,往往仍然仅是个人的道德准则,其中,像一个罗盘指示的方式。 但是什么引起的道德价值对一个人? 社会、亲人温暖、爱#8212;它是所有基于人类经验。 当你无法充分经验现实世界中,许多获得经验的书。 重温故事之后的故事,我们采取自己的内部框架,其中我们遵循多年。 在此基础上系统,研究人员决定进行一项实验,并灌输道德价值观的机,看看如果机器人可以区分善恶,阅读书籍和宗教的小册子。 的人工智能是创建不仅是为了简化程序的任务,而且要执行重要的和危险...
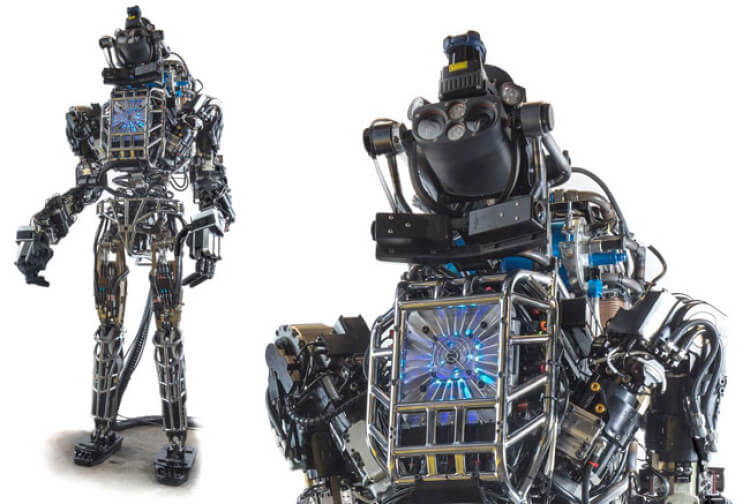
现在,当它涉及到机器人,看来没有人们想象镜头从"终结者"。 学会了使用机器人的良好社会,现在根据这一定义,躲不仅人形机器,也是那些仅仅能够实现自动化的一个进程或另一个。 巨大的工业机器人正在用于采矿企业、工厂、车会和家用电器,以及小其对应方定居在某些房子里。 但有最先进的机器人在地球上? 如果是这样,它看起来如何和工作的? 如何创造最为复杂的机器人 这个机器人是创造了近7年前,它是不断发展,到目前为止,还没有一个已经成功地超越. 机构为国防部高级研究项目,美国(国防部研究计划局)共同开发了人形...
最近的伊隆麝香透露的秘密千年的摄像头上后视镜的车特拉斯模式3. 虽然主要目的的任何摄像机拍摄周围发生的事情,发现了一些细节。 因此,该相机将按照车辆的时刻,当它的工作原理在自动驾驶仪或租金,直到所需的主(麝香认为,这将是«排斥»的部分费用在购买车)。 其他的相机的功能:识别驱动程序(如果有多个)和自动调整的所有系统,以一个特定的人。 从座位和镜子所构成的气候系统。 特斯拉的发展是跨越式发展,被广泛使用的道路和汽车本身是能够跟停车场附近。 这是一个现实,我们阅读小说,一些5-1...
相关消息

...



...

...










评论意见 (0)
这篇文章已经没有意见,是第一个!