

















机器人-蛇学会了如何爬上梯子
 Source:
Source:
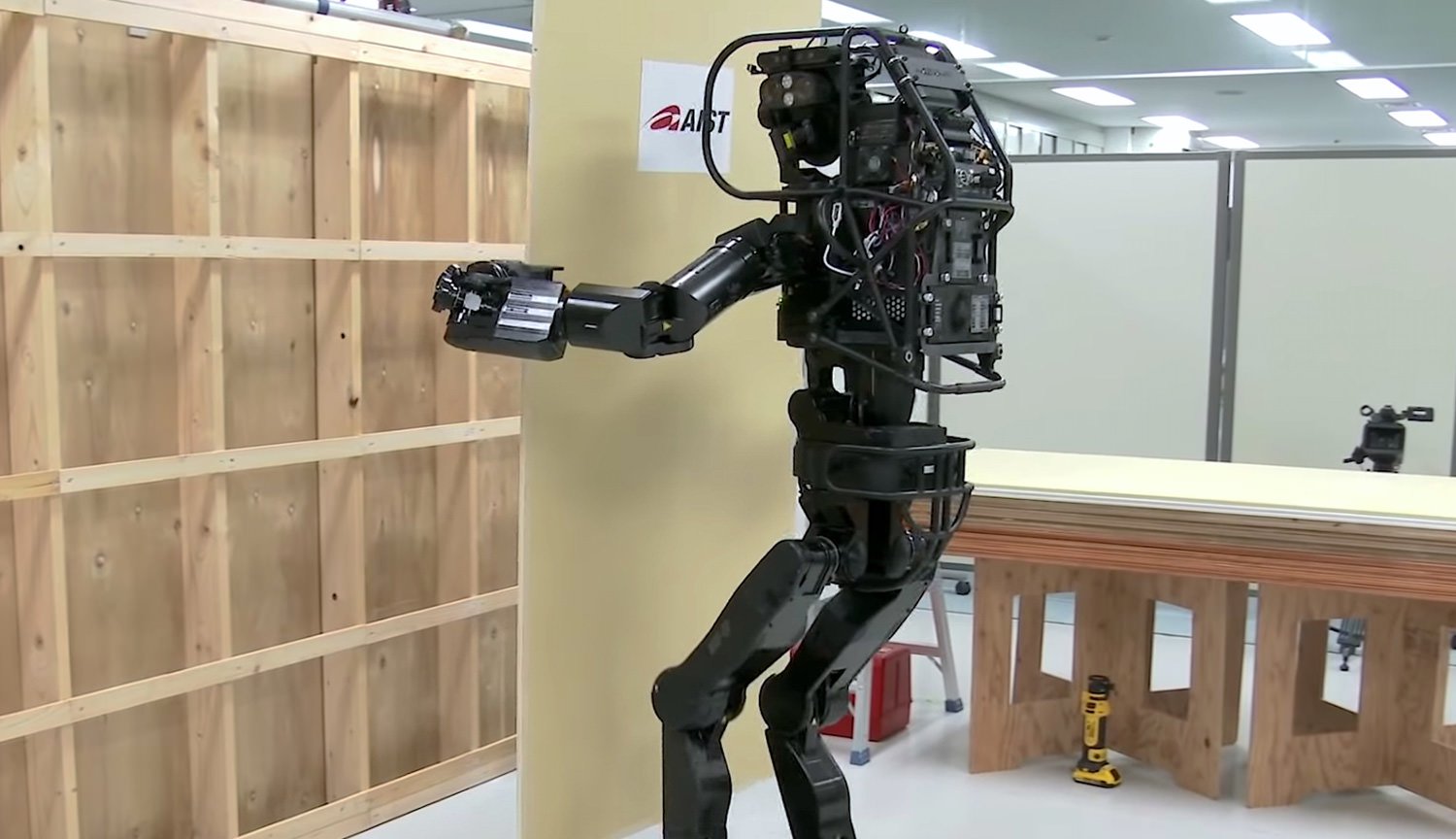
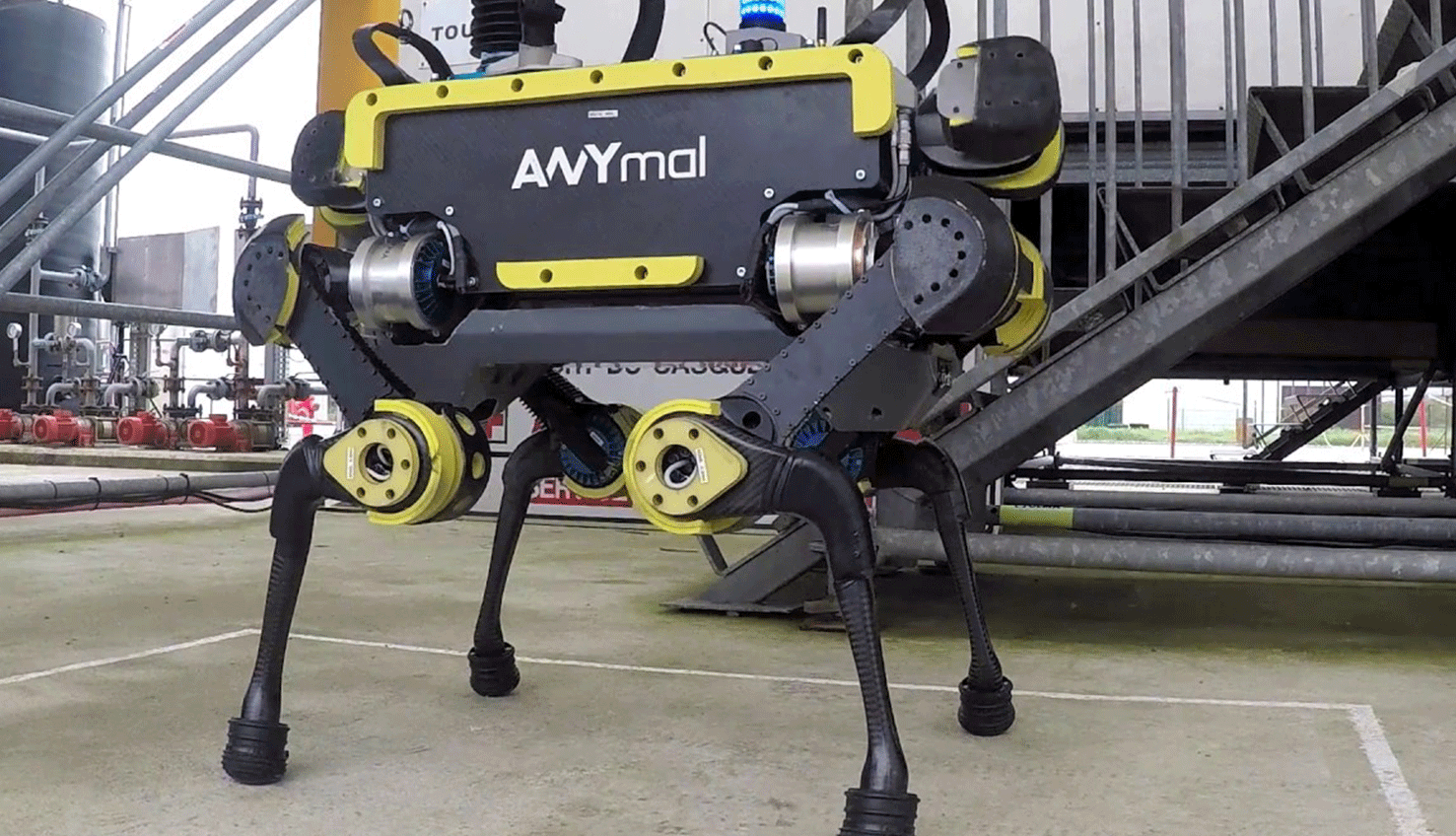
<人形机器人喜欢Atlas从波士顿动力可以跳跃过障碍,和一个机械狗SpotMini没有问题。 不幸的是,这是无法控制的一个阶梯上攀升不仅使用腿也武器。 而波士顿的机器人的动力,这似乎是一项艰巨的任务,研究人员从《京都大学和大学电信在日本开发了一个机构可以做到这一点。 然而,设计这个机器人看起来可能很不寻常的。
<<跨id="更301458">
<工程师被遗弃的设计,带有两个或四肢和创造一个机器人在形成的一条蛇。 设计是非常简单—这几乎完全由电机、软管和联接。 这个简单给它的灵活性,慢慢地和安全地卷周围的每个阶段,并在楼上。 视频显示她完全重建运动的真正的蛇。
<<面width="500"height="281"src="https://www.youtube.com/embed/t5UvFkt87NE?feature=oembed"架边界="0"允许="自动播放;加密媒体"allowfullscreen>
<它被认为是机器人蛇有很多不同的应用程序。 例如,他能够爬网通过管道和寻找地点的堵塞和执行救援行动,像搜索受害者的地震。 在可能2016年,一个类似的机器人Eelume证明其有效性。 后来,在二月2017年,他学会了工作,在深海的公海上。
<除了灵活性,蛇形设计的另一个优点—成本低。 多少成本发展一个机器人-蛇—不详,但鉴于最小量的部件,这一数额显然是低于成本的机器人士顿的动力。 通过这种方式,定于2019年,但价格仍是个未知数。
<你认为是什么,还有什么其他的利益有类似的机制? 你的选择可以被描述中的评论意见。
建议
焦虑时,不是所有的作品,因为它应该,而是一个完全彻底改变,往往仍然仅是个人的道德准则,其中,像一个罗盘指示的方式。 但是什么引起的道德价值对一个人? 社会、亲人温暖、爱#8212;它是所有基于人类经验。 当你无法充分经验现实世界中,许多获得经验的书。 重温故事之后的故事,我们采取自己的内部框架,其中我们遵循多年。 在此基础上系统,研究人员决定进行一项实验,并灌输道德价值观的机,看看如果机器人可以区分善恶,阅读书籍和宗教的小册子。 的人工智能是创建不仅是为了简化程序的任务,而且要执行重要的和危险...
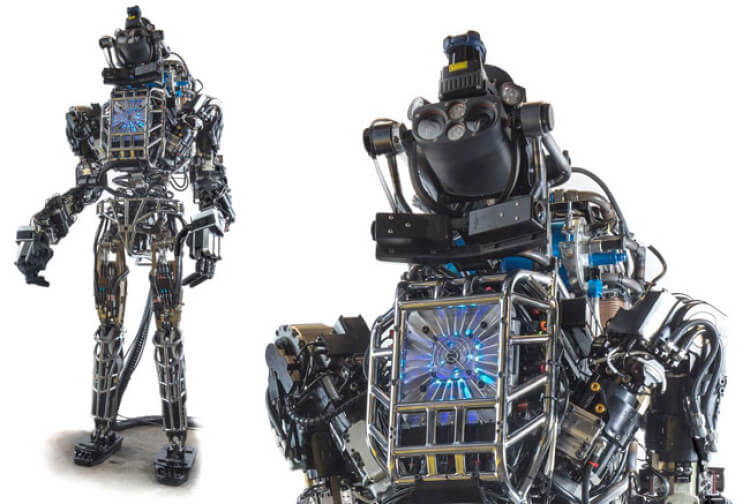
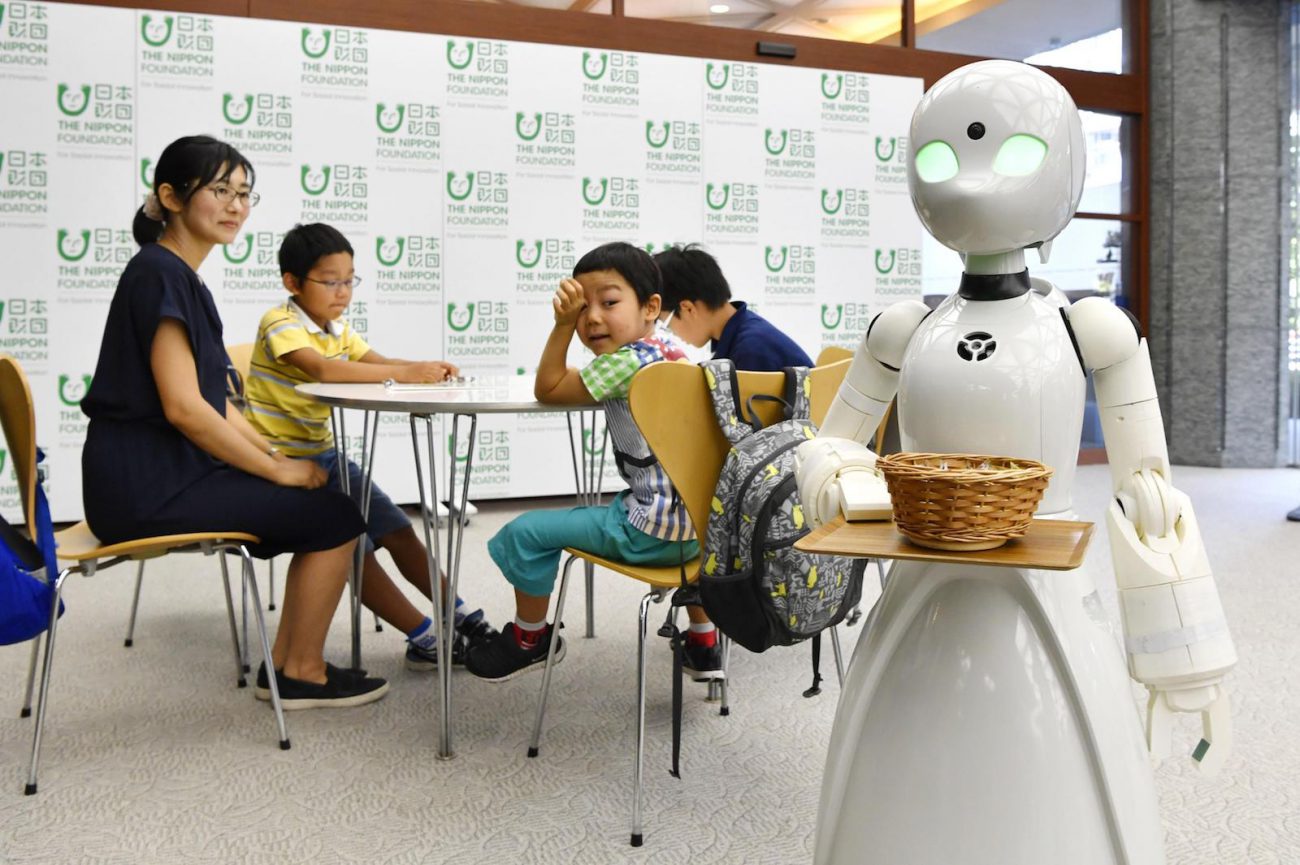
现在,当它涉及到机器人,看来没有人们想象镜头从"终结者"。 学会了使用机器人的良好社会,现在根据这一定义,躲不仅人形机器,也是那些仅仅能够实现自动化的一个进程或另一个。 巨大的工业机器人正在用于采矿企业、工厂、车会和家用电器,以及小其对应方定居在某些房子里。 但有最先进的机器人在地球上? 如果是这样,它看起来如何和工作的? 如何创造最为复杂的机器人 这个机器人是创造了近7年前,它是不断发展,到目前为止,还没有一个已经成功地超越. 机构为国防部高级研究项目,美国(国防部研究计划局)共同开发了人形...
最近的伊隆麝香透露的秘密千年的摄像头上后视镜的车特拉斯模式3. 虽然主要目的的任何摄像机拍摄周围发生的事情,发现了一些细节。 因此,该相机将按照车辆的时刻,当它的工作原理在自动驾驶仪或租金,直到所需的主(麝香认为,这将是«排斥»的部分费用在购买车)。 其他的相机的功能:识别驱动程序(如果有多个)和自动调整的所有系统,以一个特定的人。 从座位和镜子所构成的气候系统。 特斯拉的发展是跨越式发展,被广泛使用的道路和汽车本身是能够跟停车场附近。 这是一个现实,我们阅读小说,一些5-1...
相关消息

...
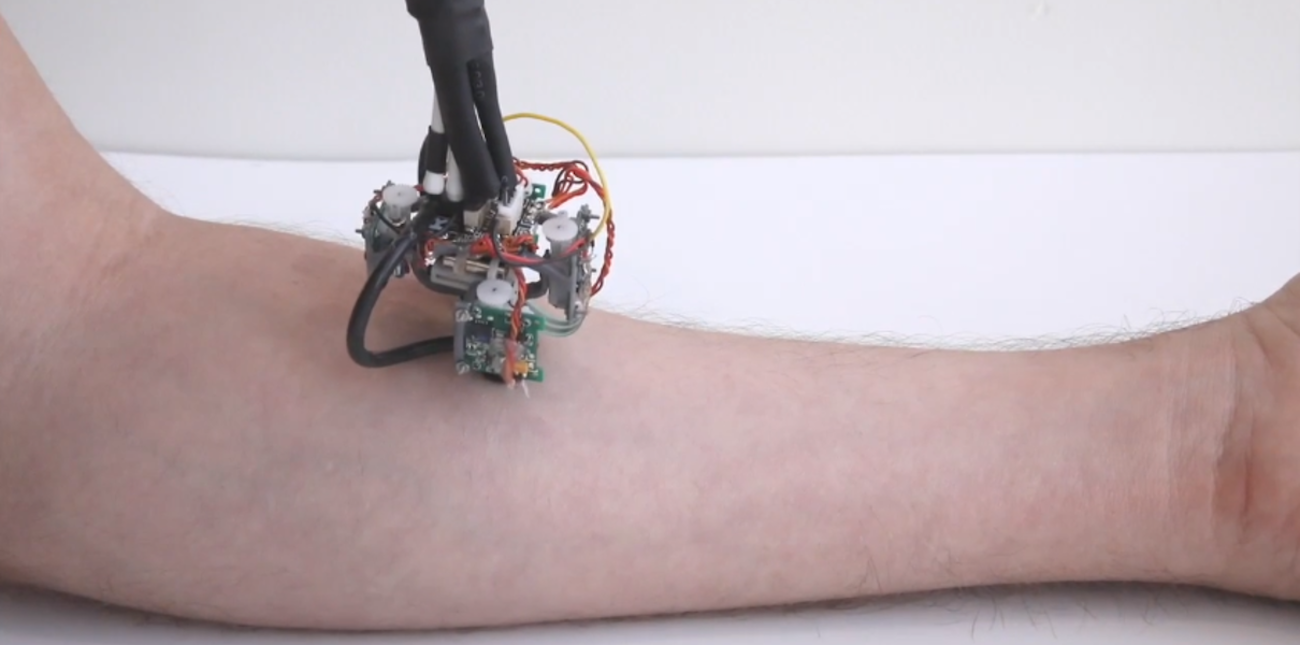
不同类型的机器人找的应用程序的各个领域我们的生活。 通常听到的词是"机器人",我们大多数人想象的东西很大,金属移动的腿上的或履带。 然而,有机器人要小得多。 例如,机器人,通过创建工程师从媒体实验室在麻省理工学院(MIT)。 他们设法设计一个小机器人,其借助的吸盘连接到皮肤和可能进行的其诊断,确定不同的国家。 ...
...

...









评论意见 (0)
这篇文章已经没有意见,是第一个!