

















なぜ足歩行ロボットです。 例ANYmalの答え
 Source:
Source:このネット環境さえあれば、四脚ロボットです。 お知らせいたしますの新機能と機会、そのとかあるのが現実世界を相手とする その問題は未解決のままで終えているのであり、なぜこれら全ての機械です。 の可能性をさらにこれらをつなぐロボットによる瓦礫の結果として様々な災害や事故、軍事利用において、どこでどのように応募できる類似の四足歩行機械のか? 最近、ボストンの動態のロボットSpotMini査を実施し、建設サイトです。 では、どんな状況にも優位性の機械です。
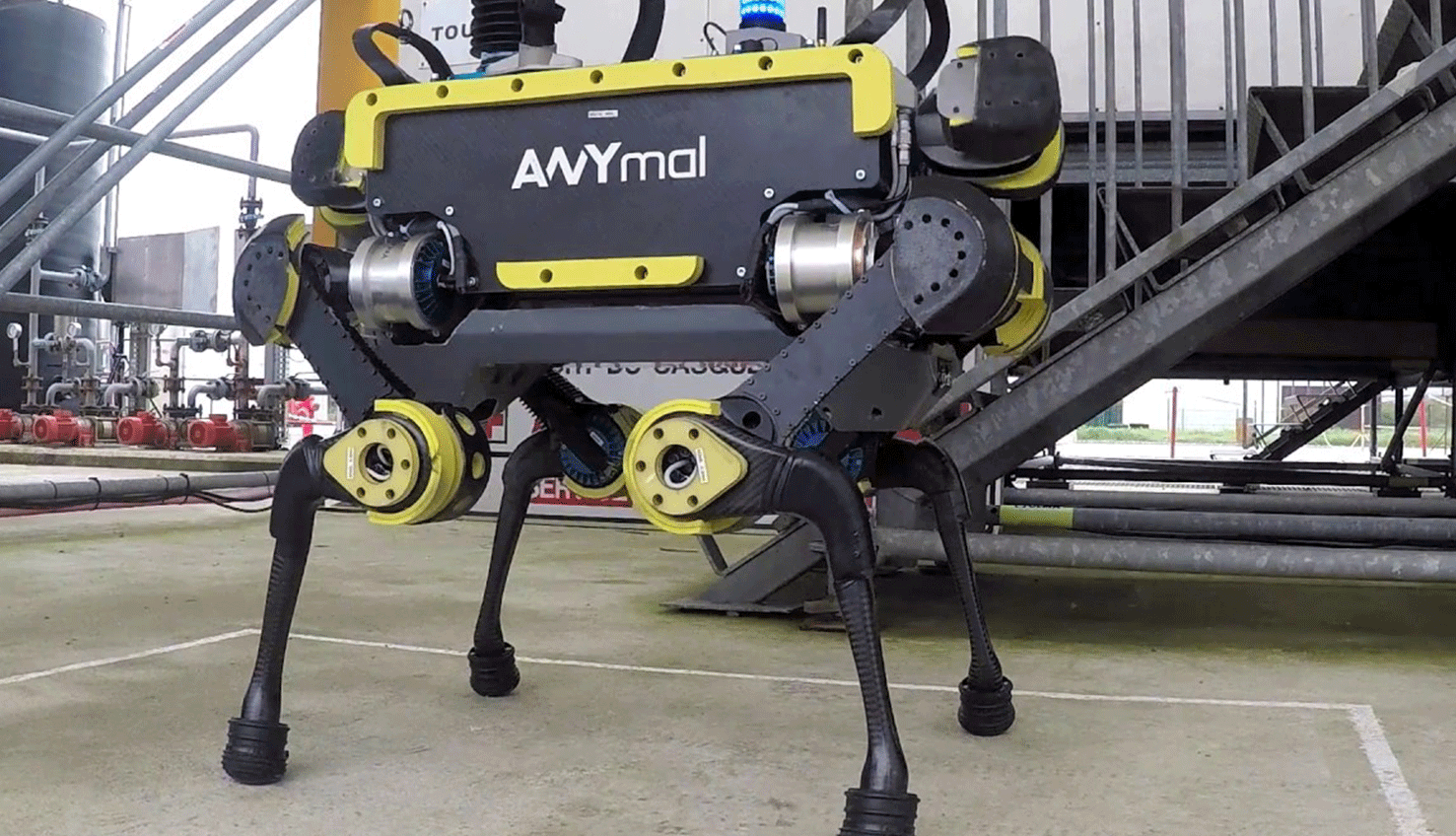
今回、当社ANYboticsを持つ四脚ロボットANYmal非常にリモートから海岸の発電所を北海ます。 ここで働きかねます。 基本機能は自動化されています。 がプラットフォームは常に1-2人のための定期健康診断のすべてのシステムとモニタリング、各種検出器のセンサです。 どんな多くの同意な位置にします。
"最も重要な側面の他の電力供給会社は安全安定運用のすべてのシステム、特に、エネルギー生産の海岸。 自律ロボットを提供できると同レベルの支援を行う際定期的及び必要にチェックの機器のインフラなどの企業です。 の枠組みにおける世界初のパイロットプロジェクトの伝送システムオペレーター TenneT電力を決めた経験は、世界最大級のコンバーターに位置し、北海、四脚ロボットANYmal"です。
見直し以下のビデオは、なぜこれらの四脚ロボットのようなANYmalほとんど目的のためには理想的です。 車が動の滑らかな表面が引き上げの階段を下ると、絞りを通じて狭い場所です。 ト二足歩行ヒューマノイドロボットでもシンプルな作業が難しく、デザインの四足歩行ロボットで取り扱うととも楽々です。 もちろん、この利用この場合、このロボットトラックですが、将来的にご検討されている効果的な場合に追跡する機械のクライアントにとって障害物を回避し、四脚ロボットするだけで簡単に渡します。
このスピードアップと効率化ANYmalは、適切なレベルに行なえるようになり、タスクでも、これらの機械には短所もあります。 同デモ動画の見方をしています。 例えば、場合には、残虐なった短い脚鉄四脚の友人–この妨げに彼の視認性のための観測高度に展開されセンサとカメラの位置づけ、その船体ます。 また、機械にはできないの扉を開け電気配電盤のスタッフに保つために必要に応じこれらの施設がオープンします。 でもこれは小さいことで簡単に解決することによる環境で車を走らせるより優します。
をより明らかな不同ANYmalは異なります。 この機能に簡単に対応で日頃のは、単調な監視とも伝えることができるようにすれば何かがおかしくなったのではないことに修理に失敗した装置です。 それは、かつてのようなロボットの企業は常に必要とする様々な複雑な技術課題とします。 ロボットできませ替え人ができた穴あけ、日常では、単調な作業です。
コメントプロジェクトについてANYmalとその試験で海のプラットフォームであるジャーナリストの学術出版IEEEスペクトルをピーター Fankhauserので、ベンチャー企業や商業当社取締役ANYboticsこの機械です。
う特徴はANYmal仕事をこのような環境です。
を用いた移動ロボットの実際の産業用条件を必要と解決の複雑な課題です。 は最も重要なポイントの存在、後者の自主性、普遍的な移動を可能にし、仕事の大規模な複雑な環境の様々な制御や試験装置から外してください。 一般に、ロボットのデザインANYmalも予測を算出するのに使用した、作業条件、環境、配下に作成されます。 一言で言えば、簡単に行き来できるすべての面で、階段の移動により狭いスペースです。 コンピュータビジョンとライダーセンサーをANYmalへの航空間の計画は安全な通路を通じて出会いしょうかどうしょうじょう)とします。 中制御-試験機器機械を使用して通常の光学カメラ対応のズーム、サーモカメラやマイクロホンは使えません。 すべてのこの収集データ詳細をさらに詳しく調べるためには、機械オペレーター"します。
あずきコーポレート-ガバナンスをANYmalします。
"への支援オペレーター TenneTのオーナーは、プラットフォームしたて準備をすることができるもの展開ANYmalを確保するため、いず驚きます。 いて詳細に研究のスケジュール作業ロボット作業を行い、シミュレーションの仮想計画。 ますます、当社の取り組みに高い安全基準の動作には、リモート海洋力発電所です。 これまで一週間の安全教育-訓練を積極的に実施し、研修の避難ヘリコプターによる解析の回復シナリオの水面と装備の分野のチームは、必要なすべての保護装置です。 もちろん、私たちは、私たすべての必要な予備機械の部品をめに必要になる可能性がある場合に想定外の故障ます。 すべての最寄りパーツの店舗まで離ればなれになった約100キロメートルとなります。"
をどの程度現実的には、ANYmalの交換が可能で男す。
"この可能性をシミュレーションを行う人間の能力を十分に分析し、問題の所在を別のオブジェやツールを決定します。 その代わりに作りを目的とした交換用ジェクトマネジメント領域を扱い、動作の自動化ツール案内もあります。 メカニズムを通じてできることができるレベルの安全性と効率性の植物になりました。
ANYmal準備のための継続的な自律的に働きかけているのか? うこすか?
"を強化しており、複雑さや時間の作業は、各プロジェクトです。 次のステップの開発などのモニタリングの可能性の長距離試験の充電などロボットです。 完了商品のご用意となります。
の決定の業務にど、自分の意見を適用し,自律ロボットなどANYmalす。
"の瞬間において複数のプロジェクトのエネルギー、製造業、建設、農業およびその他の専門は、通常のプロジェクトです。 すべてのこれらの地域は、移動ロボットを提供できる重要な支援します。 携ANYmal、その人が自分のアイデアの使用の機械では、いってみないとわから開発しています。 今後は、範囲の商業機会と共に自分が成長できる機能をロボット"です。
を議論します。
以上
不安を抱きないものとしてでもう完全に変わが個人のモラルコードのようにコンパスに問題がないかという点について. だが道徳的価値をめます。 社会切温もりを愛—では、すべての人の経験です。 ますが、いったん完全に経験を現実の世界では、多くの経験などからです。 追体験の話の後に、また自身の内部フレームに従います。 このシステムの研究者になることが分かりました実験を広めるための道徳的価値機がロボットを識別できる良いか悪、読書および宗教パンフレットを送付いたします。 人工知能を作成しないだけの...
現在ではロボット、そうでないなどを想定した映像からの"ターミネーター". 学習用ロボットは社会のためには、その定義、隠れていないヒューマノイドの機械でも人で自動化は一工程ます。 巨大な産業用ロボットを用いて鉱山企業、工場、自動車組み立て-家庭用機器の小型カー決済の一部です。 が最も高度なロボットに関す。 との答えを見出さなければならないです、ですか? インストールの作成方法については最も複雑なロボット このロボットを作成したほぼ7年前では常に開発し、これまでにな管理の弦. 庁防総省国防高等研究...
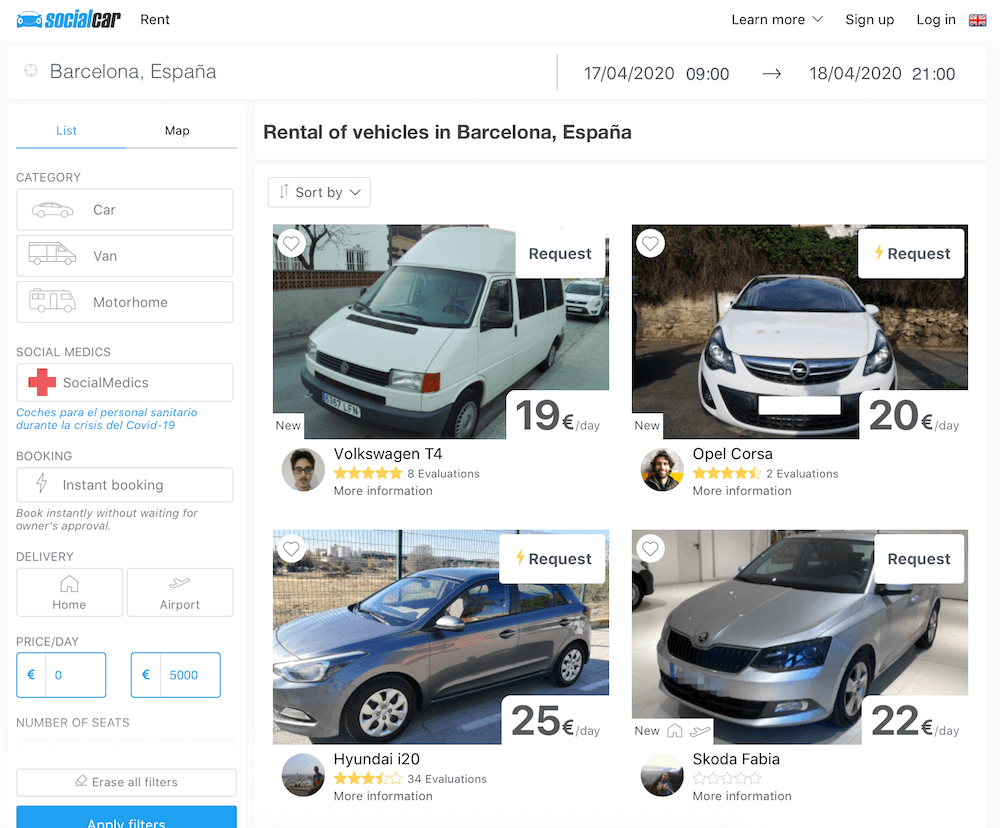
最近のElonスクを明らかに秘密のミレニアムのカメラ上にリアビューミラーの車テスラモデル3. その主な目的のカメラでの撮影に何が起きているのは、見出し一部。 なので、カメラの車両の上で動作している場合は自動操縦装置または賃貸で、ご希望のホスト(マスクと考えられます«踊»費用の一部を購入する際の車)です。 その他のカメラを特集:ドライバーの同定(複数)と自動的に調整されている全てのシステムの特定の人です。 客席からは、鏡の構成に気候システム。 の開発テスラは飛躍的に広く使用され...
関連ニュース
現代ロボティクスが既に愛されている。 だけ少なくとも最近の進展にボストンのダイナミクスを記憶させる工場にロボットを作成その他のロボットです。 しかし、原則として、ロボットのカバリーのメカニズムを利用するものです。 仕事を一緒に同じことだけで仕事を受け取らないコマンドからのオペレーター)のロボットでも知ら非常に悪い事です。 での研究グループは日本からの開発したアルゴリズムとロボットは、このスキルです。 を開発技術者が東京大学大学院長石川正俊されているが、伝...

現代農業用の補助機械工具の生産に改善しました。 すべてのせ、この技術ニーズケア、保守、燃料のものが持つ特別な技術のための運営に当たっている。 の企業の生産のための小型ロボットロボットとともに企業の専門家からブリストル大学の最近決めることができると思うのですがに普遍的な機農業に紹介したロボットは、きわめて大多数の既存の農業ツールです。 ものの名称-ディベロッパーの試作品がなかなかいない小さいものに適しています。 その高さは3メートル、重量—25...

イギリスで開催された世界初の軍事演習の参加のもとで、人との戦闘ロボット
ロボットの開発もいたが、その軍隊を採用一部のモデルの戦闘ロボットです。 この場合でなされるアプリケーションになっているような"標準"の爆します。 イギリス軍の自律的な武2018年までにサイトのソールズベリーン台地南東ズ)の数週間で行う演習の種類のロボット軍用装置の大規模な実験を伴う戦闘群の人間とロボット特別に模擬戦闘状態です。 主な目的は自律的な戦士の2018年には試験の相互作用の異なるロボット、もできるのかを探ることを統合、既存の軍部は、英国などで行っ...

杭州,浙江省東部中国は、現在、第回世界インターネット会議が、世界初となるニュースを伴うコミュニケーションにおける情報の画像の発表者です。 放送局に基づき、最新の技術、人工知能の一分野でのようにな人は声、顔の表情、ジェスチャーのリアルな人です。 "へ"の学習生活の自立とは、読むことのできるテキストのようなプロのニュース放送します。 Anchorman開発された合弁会社ニュース機構では、新華通信社の公式mediaprintablearea中国および中国の会社...

#ビデオ|ピッツァ小屋とトヨタレスロボットと料理、ピザの輸送時に
ロボットという様々な"人"務を含む料理)とは驚くに値しません。 が大きなグローバルピザチェーンピッツァ小屋の名トヨタ自動車メーカーの影になっています。 一方、変化へのアプローチを納入。 この会社を支えるロボットの料理人がピザ、キッチンで、特装車、既に、秩序、お客様の任意となります。 の発表会が開催されました展示会開催中SEMA Show(特殊機器市場協会)のラスベガスプレゼンテーションでの新製品からトヨタです。 モバイル工場の生産にピッツァに位置し、ピッ...
工場での生産のロボットは多くの国です。 約の意思を実行2017年度には、とっても、ロシアの基礎研究です。 とにかくリーダーの生産のロボットは中国です。 地元企業をロボットは自動販売の機関からその他部品の世界です。 によるロイター、中国によるロボット工場は、ロボットに関するワンストップサーに、人にします。 この新工場を構築することが含まれるスイスの会社ABBされることで引き起こされる様々な機器から電気機器産業用ロボットです。 場所の周辺キャンパスロボット会...

近年のロボットがますます私たちの生活の一部です。 すべての深刻さのをロボットの一部の権利は、すぐにロボットを行う前にイギリス議会は、最近に知られるようになった話では珍しい実験します。 の大学の米国でのロボットの開始を目指します。 ではない正確な科学に数学や物理学、非常に具体的なこと—念します。 実験で開催された米国陸軍士官学校では、ロボットの先生の名前Bina48ます。 一般に、Bina48—このかわいらしい古いデザインに異なると...

#映像|ベンチャー企業であるボストン-ダイナミックス訓練ロボット"parkour"
二年前にボストン子会社が導入した新世代の二足歩行ヒューマノイドロボットアトラスです。 修正済みのバージョンの歩行の凹凸のある面では、タフで独自のイベント下落します。 さらに、ロボットのためのナビゲート空間を特定できる各種オブジェクトとしています。 最近の車にはエラーメッセージを更新し、その能力の印象的なものも含まれています。 専門家からボストンのダイナミックス訓練Atlasあsemblanceのparkourます。 現在のロボットでは、もの移動障害物とも...

ヒューマノイドロボットのようなアトラスからボストン力学では,障害物、ロボット犬SpotMini問題なく行えます。 残念ながら、このコントロールを超えてはしごを登るための使用は足も武器です。 ながらロボットボストン力学がこのように困難な作業ですが、研究者から京都大学大学電気通信日本で開発できる仕掛けます。 しかし、デザインのこのロボットにも非常に珍しいです。 技術を捨て、デザインは手足を作ったロボットのスネークです。 デザインは非常にシンプルなものなんです...

に違いない、いずれはロボットする場所の提供に努めています。 現在の開発を通して爆が人々を助けるために、倉庫、生産の様々な部品です。 確自動運転車や自動車、都市のサービスも取り上げロボットに警察します。 ことになるかもロボットメカニズムのマスターの新しい職業な乗客の東京の地下鉄に乗ります。 によるとNHK出版の世界-日本のroborovski法としての"窓"の提供に関する情報は地下鉄の駅も問題がないかという点について、ご希望の場所を説明するなどの特定の部分...
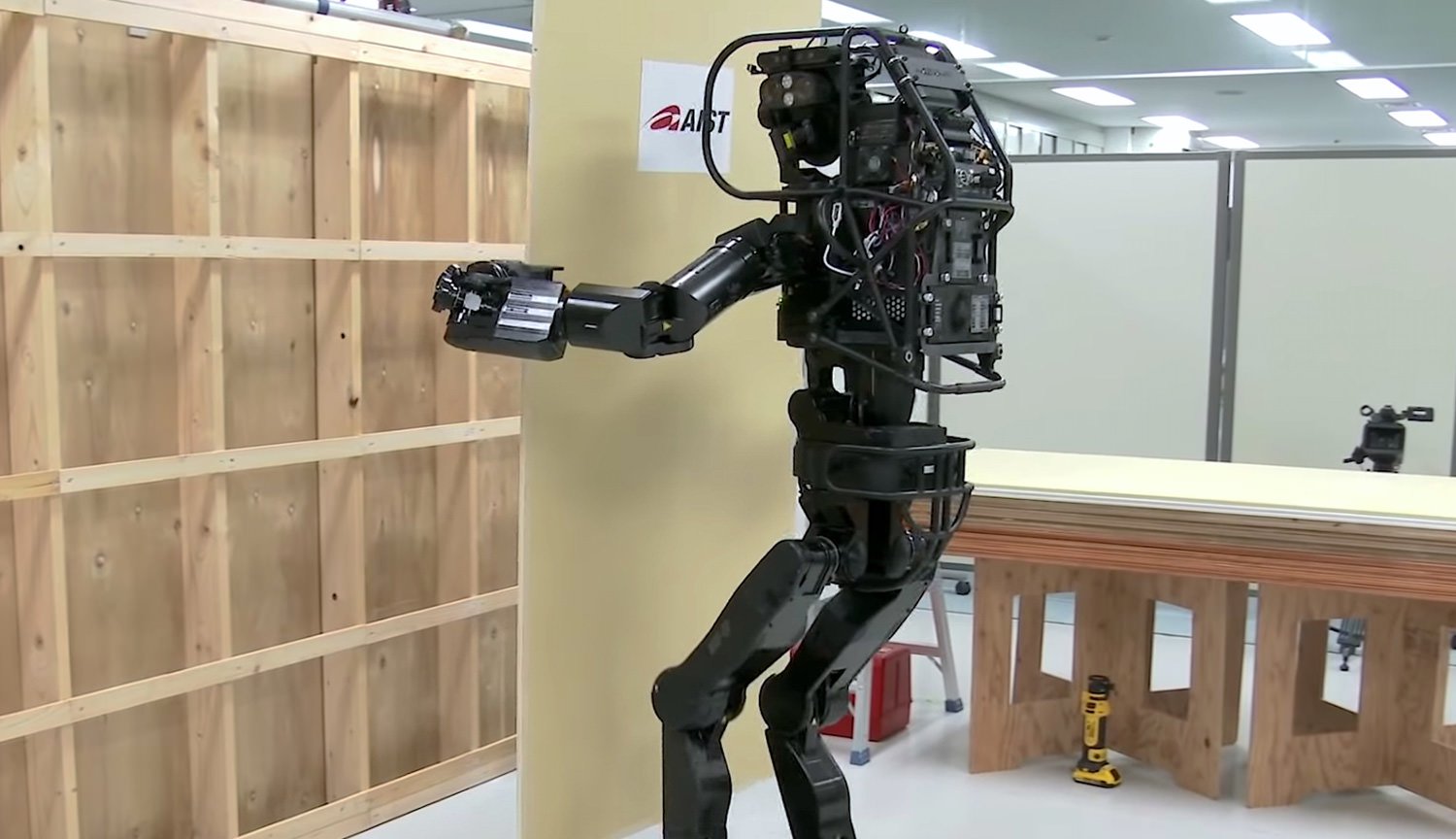
ビデオ:二足歩行ロボットビルダー HRP-5Pの自己を確保ボードの壁
日2018年のドイツ語センター航空ンをお楽しみくださいます。 計画どおりに、今後たどのようにdroidsして人間性の構築の住宅に火星の地表をします。 同時に、技術開発ロボットできる人を助けます。 その一つがHRP-5Pからの日本企業産業技術総合研究所 その出版されたビデオ彼のラボと釘打ちでフレームのお部屋です。 そのデザインと動きの日本語-ドロイドなどのアトラスロボットからボストン力学です。 しかし、あまり大きな違いHRP-5Pは全然であり、外側の身体...
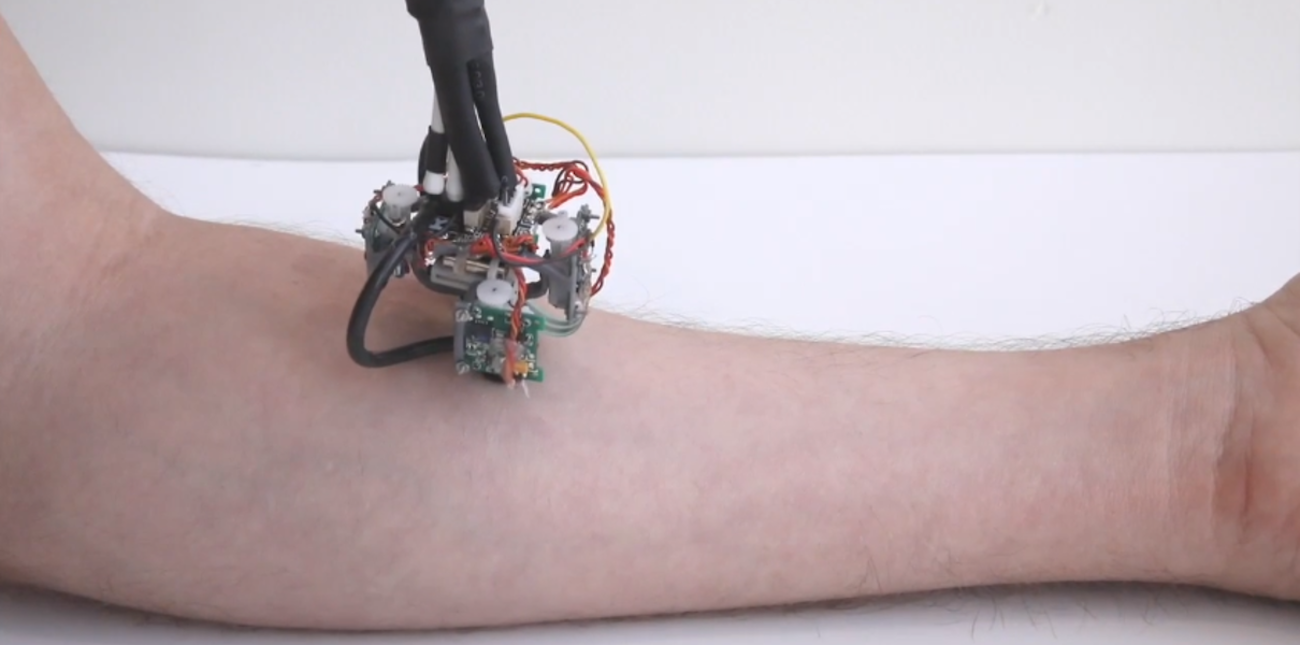
異なる種類のロボットがさまざまな領することにあります。 通常、聴覚、"ロボット"は、ほとんどの人が想像も大きく、金属、脚又は笑えます。 が、しかし、ロボットはかなり小さい。 例えば、ロボット作成技術者からのメディアラボ、マサチューセッツ工科大学マサチューセッツ工科大学(MIT)です。 したデザインの小さなロボットによる吸引カップ付属や皮膚に行っているかもしれない、その診断、特定の異なる。 に応じて編集部のProceedings of the ACMインタ...
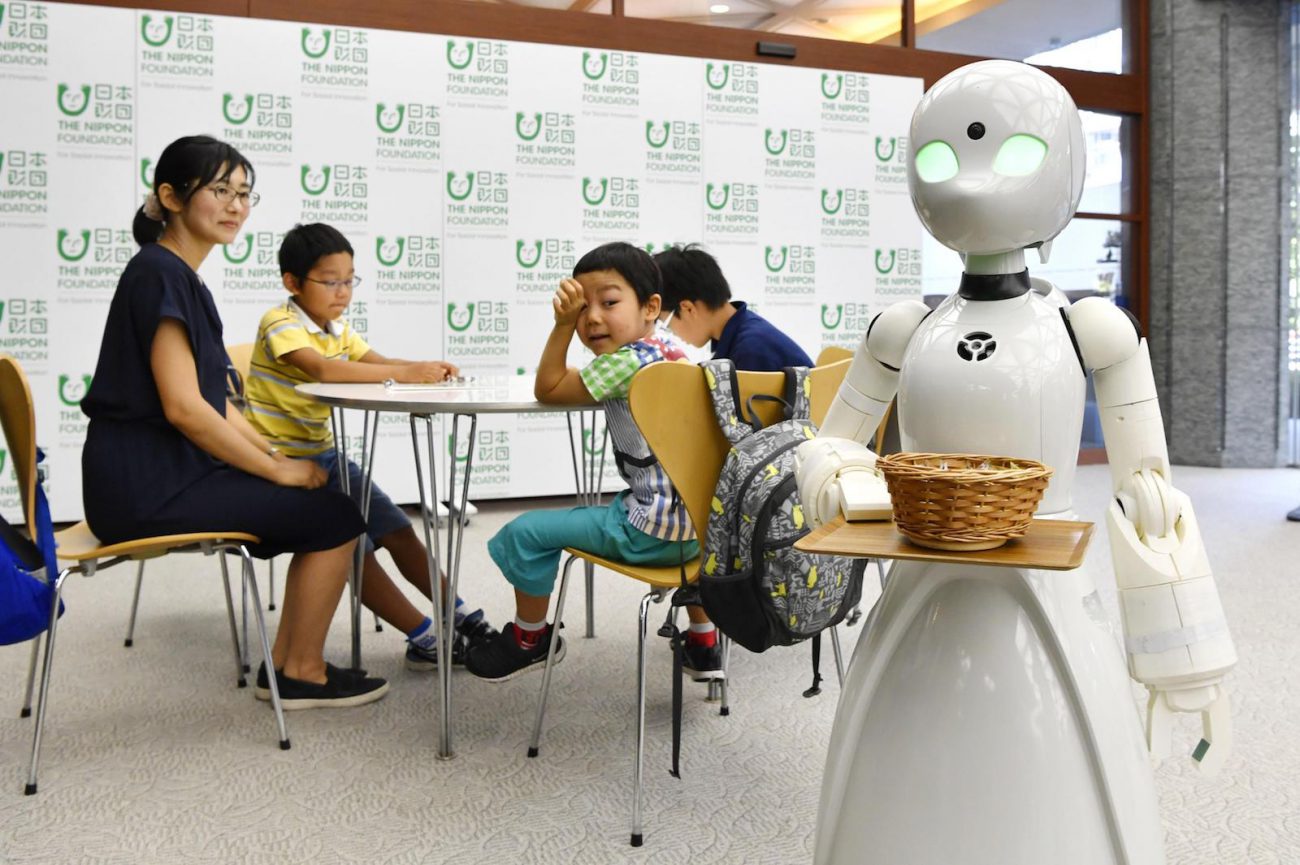
障がい者、現代の技術には、多彩なソリューションを許可するだけでなく生も多くの別物です。 もっこった日本の開発者は、月末2018年までに東京を開始する計画性の高い珍しい実験による、カフェ、来場は変更する場合があり唯一のロボットです。 管理が人工知能、限定されます。 また、開発者は、ほぼ完全に麻痺します。 新しいカフェオープン地区赤坂期から26日-7月に受注するロボットの織姫-D制御する人との物理的限界がある。 織姫-Dジです。 両方対応のための遠隔コミュニ...
ビデオ:ロボットANYmalを行う業務はなるのではないかとのSpotMini
が開発したボストン力学のスポットロボットミニ、知り尽くしたり、うことができるものとすることが出来ました。 彼の名前ANYmal—みんなで作るあったか手作り技術者のAnybotics、当社のロボットシステム研究室のスイス連邦工科大学チューリッヒます。 月半ばにおいて、ビデオ、ロボットの扉を開くの施策は以下のスポットのミニです。 初ANYmalくの扉が開かれ、彼機械です。 この社員のうために作られたものなのだとか光のショックが、ロボットを簡単にバランスです...
そうした場合は取得しました機械を作ってくれ"という"人"です。
ボーダーの間に現実世界とデジタル世界を続け、その重要性に当社の個人生活や成長を続けています。 一つの核融合の仮想と現実世界の一環としての産業革命です。 これは、この革命として、個人、企業、社会-地域社会はいまだ明らかになっていない。 グレッグ-クロス統括する管掌役員(兼任)を務め、ニュージーランド社開発の人工知能機械心sectetることの必然の結果、崩壊のこれらの境界線はその人が費やし、より長い時間との交流の技術です。 間のグローバルサミットSungul...

ことも多いの研究者のための研究"spy"から自然ます。 例えば、最近ではチームのアメリカの科学者からフロリダアトランティックユニバーシティとその同僚からのoffice of naval researchにおける開発したロボットベニクラゲを見るのに適水中の生活や様々な探鉱事業です。 による版のBioinspirationデバイス、検査、研究者の3Dプリンタで印刷し、5つの異なるオプションロボットです。 それぞれが異なる硬度が若干異なるデザイン要素です。 こ...

ロボットの開発では非常に困難になり、必要な資源を消費します。 ることができる非常に速い機械を創造する使用可能なものは、どのようなプロジェクトOmniSkin–"robocode"にとりまして、ほとんどのオブジェクト管理ロボット機構です。 を開発OmniSkinsグループの教授らの研究レベッカKramer–Bottigliaからイェール大学です。 各モジュール"robocode"は可動式の柔軟な高分子一体型センサです。 の移動による小型アクチュエータの加熱...

DLRのは嬉しいレースに人工知能爆します。 という、ロッキードマーチンのか?
レーシング爆人気となっており少し前までは、人工知能を取得するために決定された周りの人にこのような活動です。 今日のゼーリーグ(DRL)を代表する組織、あるいはレースに無人航空機のNASCAR発表した、新しい競争のためのチームの人に必要な開発パイロットの人工知能にします。 その中でも、航空宇宙の巨大なロッキードマーチンは、DRLい集開発者から世界中の学生や愛好家の世界から無人爆します。 いを愛できる飛行の標準化quadcopters DRLに難しいレースと...

をクリエイターのロボットやシフト管理への人工知能、管理の自分をコントローラです。 研究者から、イタリア技術研究所、ボン大学のための異なるパスを教えCentauroロボットを繰り返し運動を用いたコンピュータビジョンです。 ロボットcentaur末日2018年ます。 で四足の旋回輪、二つの手配列のカメラで捉える環境です。 このロボットで実行するように設計された災害救助の精密な動きは、このため通知を送信コマンドの外骨格が使用された。 この方法の操作に必要な事...

シンガポールロボットの開発を3Dプリンタでの出力を目的とした建物
の3Dプリント技術を創造できるほどです。 でも最高のプリンターがあり非常に重要な欠点も設定する必要がある特定の場所で印字した後に、材料にお届けします。 という便利な場合、プリンタに印刷します。 こうしたい研究者のシンガポール、移動ロボットのための3Dプリントします。 の開発を担う科学者からのナンヤン工科大学です。 実験中に行ったところ、これらの印刷によるロボット、コンクリートデザインです。 に応じて著者には、 "重要なこのシステムの創成が可能でありパーツ...
コメント (0)
この記事にはコメントすることですが、最初の!